
目录
1. 最短路径问题简介
在广阔的计算机科学领域,很少有问题的适用性比“最短路径问题”更普遍。无论是谷歌地图在拥堵的交通中计算最快的回家路线,还是互联网路由器决定如何转发数据包,底层的数学原理都是相同的。
从根本上讲,该问题询问的是:给定一个由节点(位置)和边(连接路径)组成的图,每条边分配有一个“权重”(距离、时间或成本),从起始节点到目标节点使总权重最小的路径是什么?
尽管这个问题听起来很简单,但图的性质(是否为有向图,是否包含负权边,或者是否有环)会彻底改变计算规则,需要采用完全不同的算法方法。在本指南中,我们将解析最短路径算法的三大支柱:Dijkstra、Bellman-Ford 和 Floyd-Warshall。
2. Dijkstra 算法:贪心的工作马
由传奇的荷兰计算机科学家 Edsger W. Dijkstra 在1956年构思,该算法是计算机网络路由和地图导航的无可争议的王者。
策略: Dijkstra 算法使用“贪心”(Greedy) 方法。它总是选择距离源点最近的未访问节点,探索其邻居并更新它们的距离。一旦一个节点被处理,它就被永久地标记为已完成。
工作机制
为了高效地找到当前已知距离最小的节点,Dijkstra 严重依赖 优先队列 (Priority Queue)(通常实现为最小堆 Min-Heap)。
- 为每个节点分配一个初始距离值:起始节点为
0,所有其他节点为无穷大。 - 将起始节点插入优先队列。
- 当队列不为空时,提取距离最小的节点。
- 检查此节点的所有未访问邻居。
- 计算通过当前节点从源点到每个邻居的距离。
- 如果新计算的距离小于邻居已知的距离,则更新邻居的距离并将其推入优先队列。
Python 实现
import heapq
def dijkstra(graph, start):
# 将所有距离初始化为无穷大
distances = {vertex: float('infinity') for vertex in graph}
distances[start] = 0
# 优先队列存储 (距离, 节点) 元组
pq = [(0, start)]
while pq:
# 提取距离最小的节点
current_distance, current_vertex = heapq.heappop(pq)
# 如果我们已经找到了更好的路径,则忽略
if current_distance > distances[current_vertex]:
continue
# 检查所有邻居
for neighbor, weight in graph[current_vertex].items():
distance = current_distance + weight
# 如果发现更短的路径,则更新
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(pq, (distance, neighbor))
return distances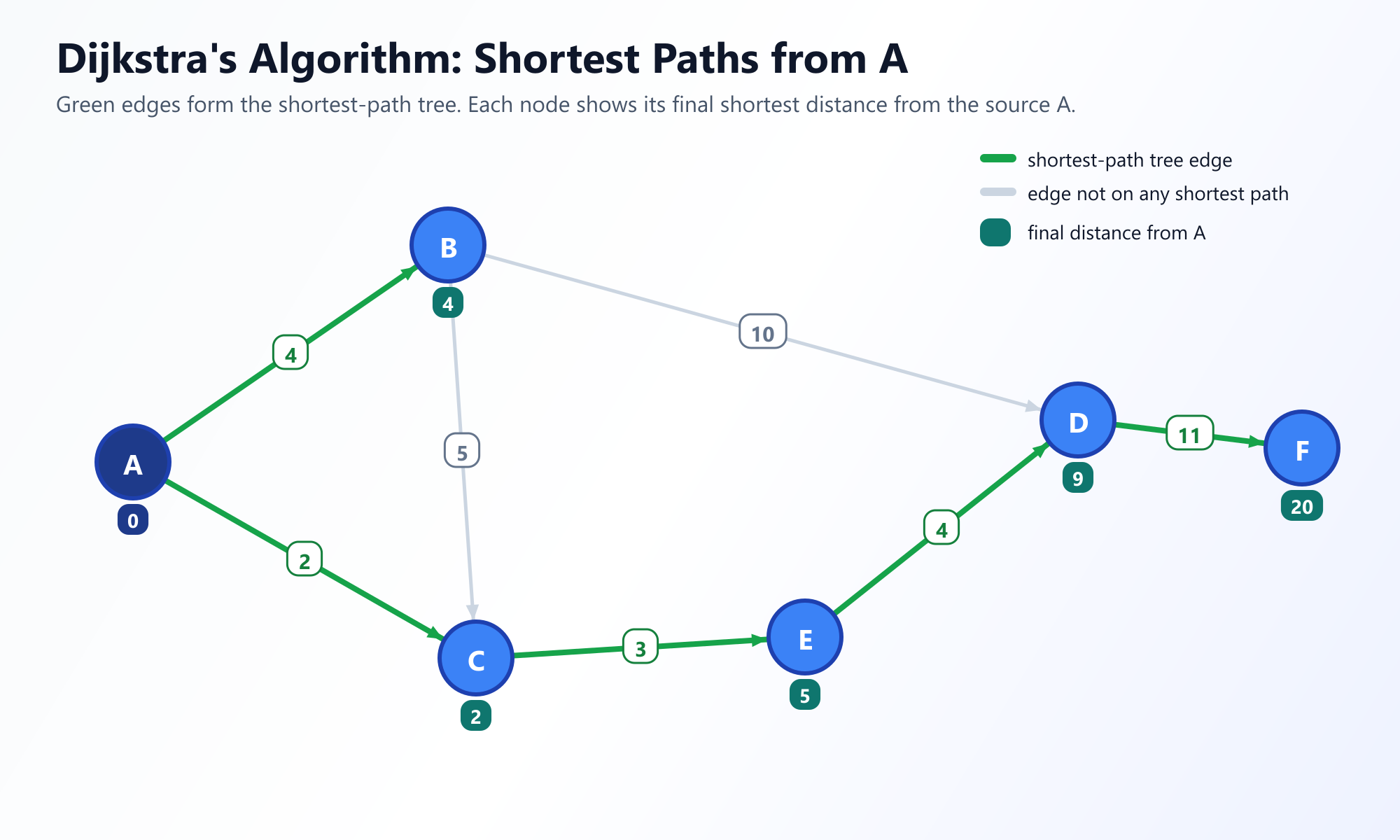
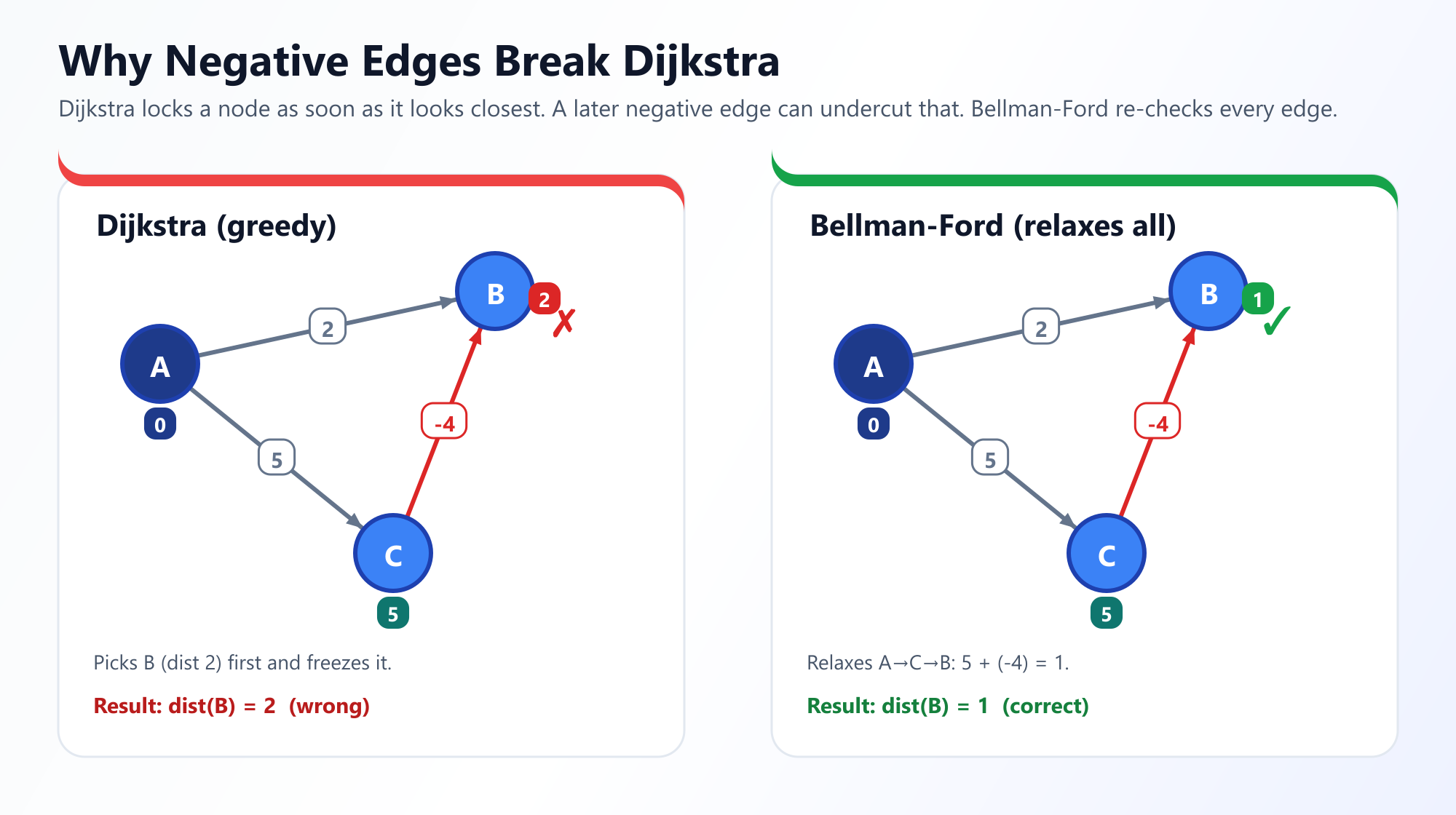
致命缺陷:负权边
Dijkstra 的贪心本质使它速度极快 (O((V + E) log V))。然而,这种贪心有一个致命的缺陷:它假设向路径中添加边绝对不会使路径变短。 因此,如果图包含具有 负权 的边,Dijkstra 会惨败,因为一旦一个节点被“完成”,它将永远不会被重新考虑,即使稍后隐藏的负权边可能使到达它的成本更低。
3. Bellman-Ford 算法:处理负权
当你无法保证所有边的权重都是正数时(例如,模拟金融交易,其中某些交易会产生利润而不是成本),Bellman-Ford 就派上用场了。虽然 Dijkstra 是一个贪心算法,但 Bellman-Ford 使用了 动态规划 (Dynamic Programming) 方法。
策略: Bellman-Ford 不是聪明地选择最近的节点,而是采用了一种大锤式的方法:它简单地“松弛”(relax)(更新距离)图中的 每一条边。并且它执行这个过程 V - 1 次。
为什么是 V - 1 次迭代?
一个没有环的图中最长的可能路径最多包含 V - 1 条边(其中 V 是节点的数量)。通过将所有边松弛 V - 1 次,该算法保证距离将稳定在它们的绝对最短值,即使路径必须穿过负权边的迷宫。
负权环检测
Bellman-Ford 最大的超能力是它检测 负权环 的能力。如果在 V - 1 次迭代后,你再松弛一次边,而某个距离 依然 变小,这意味着图具有负权环(一个无限循环,不断降低成本,比如无限的资金套利)。在这种情况下,“最短路径”在数学上是未定义的。
Python 实现
def bellman_ford(graph, V, start):
# 初始化距离
distances = {vertex: float('infinity') for vertex in range(V)}
distances[start] = 0
# 将所有边松弛 V - 1 次
for _ in range(V - 1):
for u, v, w in graph:
if distances[u] != float('infinity') and distances[u] + w < distances[v]:
distances[v] = distances[u] + w
# 运行第 V 次以检查负权环
for u, v, w in graph:
if distances[u] != float('infinity') and distances[u] + w < distances[v]:
print("图包含负权环!")
return None
return distances4. Floyd-Warshall 算法:所有节点对的解决方案
Dijkstra 和 Bellman-Ford 都是 单源 最短路径算法(它们找到从一个起点到所有其他点的路径)。如果你需要同时知道从 每个 节点到 所有其他 节点的最短路径怎么办?
Floyd-Warshall 算法 提供了一个令人难以置信的优雅替代方案。这是另一种动态规划方法,但它在图的整个邻接矩阵上运行。
策略: Floyd-Warshall 系统地检查通过中间节点k的路线是否比当前已知的从节点i到节点j的路线更短。
这个算法的优雅之处在于其三个非常简单的嵌套循环。它非常容易实现,并且对于稠密图非常有用。
![Floyd-Warshall 的核心松弛步骤。由节点 i、j 和 k 组成的三角形。直接边 i 到 j 权重为 8,而路径 i 到 k 到 j 花费 3 + 2 = 5。由于 5 更小,dist[i][j] 从 8 更新为 5。](/articles/img/floyd-warshall-relaxation.png)
Python 实现
def floyd_warshall(graph_matrix, V):
# 创建图矩阵的副本以存储距离
dist = [[float('infinity') for _ in range(V)] for _ in range(V)]
# 设置基本情况
for i in range(V):
dist[i][i] = 0
for u in range(V):
for v in range(V):
if graph_matrix[u][v] != 0:
dist[u][v] = graph_matrix[u][v]
# 核心算法
for k in range(V):
for i in range(V):
for j in range(V):
# 如果通过 'k' 的路径更短,则更新路径
dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j])
return dist5. 全面比较
| 算法 | 时间复杂度 | 支持负权边? | 最佳使用场景 |
|---|---|---|---|
| Dijkstra | O((V + E) log V) |
否 | GPS 导航,IP 路由 (OSPF)。大型非负权图。 |
| Bellman-Ford | O(V * E) |
是 (检测负权环) | 距离向量路由 (RIP),金融套利检测。 |
| Floyd-Warshall | O(V³) |
是 | 航班网络矩阵,需要所有节点对最短路径的稠密图。 |
常见问题
Dijkstra 算法与 Bellman-Ford 算法有什么区别?
Dijkstra 是贪心算法,运行速度快(O((V + E) log V)),但不能处理负权边。Bellman-Ford 时间复杂度为 O(VE),但可以处理负权边并能检测负环。
弗洛伊德 (Floyd-Warshall) 算法有什么用途?
它是多源(任意两点间)最短路径算法,利用动态规划在 O(V³) 的时间内计算图中所有顶点对之间的最短距离。
A* 算法是如何优化最短路径搜索的?
A* 算法通过引入估算到终点距离的启发式函数,使搜索方向偏向目标节点,从而极adamente 减少了不必要的盲目路径探索。