
目录
1. 什么是 A* 算法?
A*(发音为 "A-Star")算法是一种图遍历和路径搜索算法,由于其完备性、最优性和最佳效率,在计算机科学中被广泛使用。它由斯坦福研究所的 Peter Hart, Nils Nilsson 和 Bertram Raphael 于 1968 年发明,最初旨在帮助 Shakey 机器人在房间内导航。
如今,A* 算法是路由和寻路的绝对行业标准。无论策略游戏中的角色是在网格上行走,还是 GPS 正在计算穿越全国的最快路线,A*(或其变体)都可能在承担繁重的工作。
2. Dijkstra 算法的问题
要了解为什么 A* 如此出色,我们必须首先了解它改进了什么。在 A* 之前,寻找最短路径的黄金标准是 Dijkstra 算法。
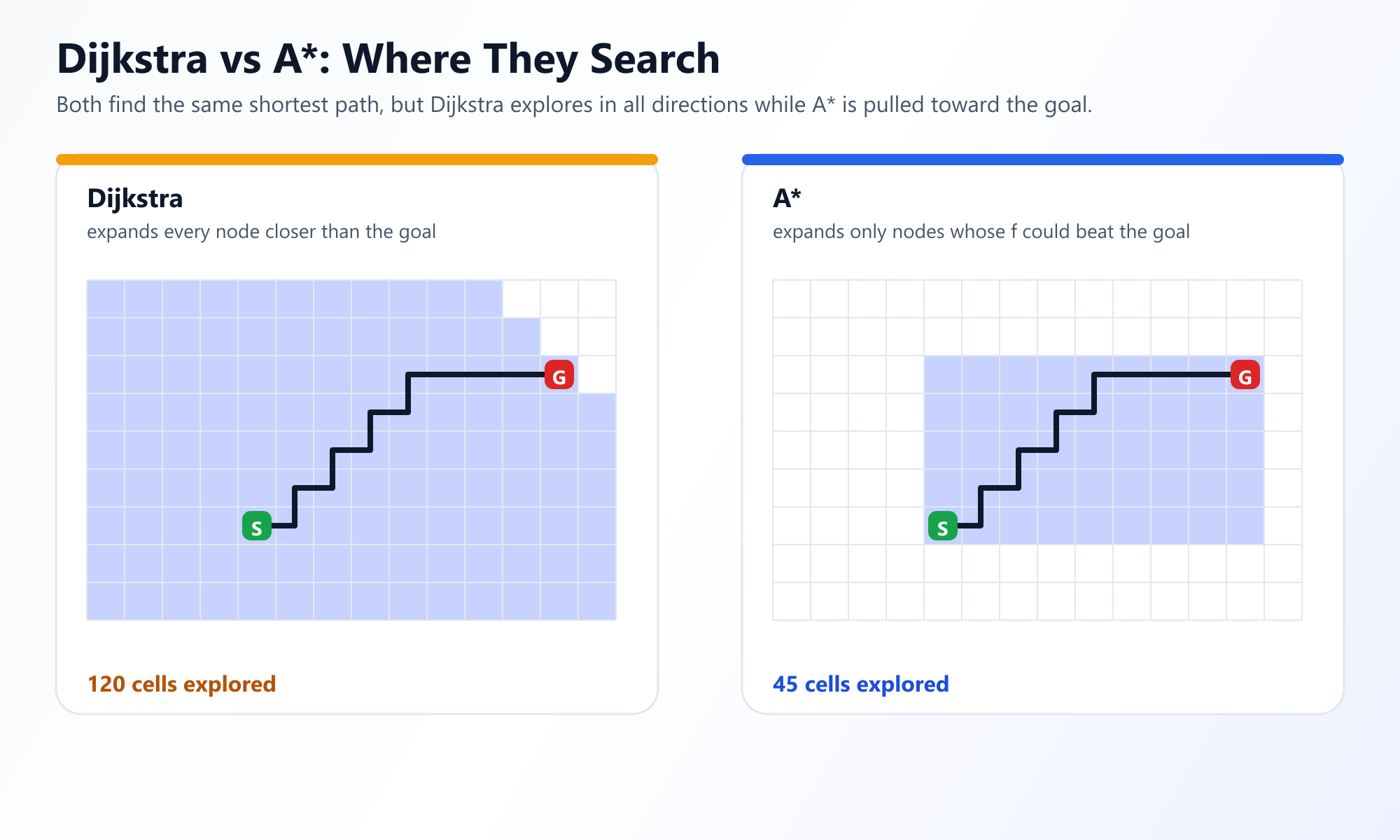
Dijkstra 算法保证能找到最短路径。然而,它从根本上说是“盲目”的。当你要求 Dijkstra 寻找从纽约到洛杉矶的路径时,它探索通向波士顿、迈阿密和芝加哥的道路的热情,与探索向西行驶的道路的热情一样高。它在一个完美的圆(或球体)中向外搜索,在所有方向上均等地搜索,直到它偶然遇到目标。
在一张大地图上,探索每一个可能的方向慢得令人难以置信,并且浪费了大量的处理能力。我们需要一种足够“聪明”的算法,知道目标在哪个方向,这样它就可以优先探索 朝向 目标的路径。
3. 秘诀:启发式方法 (f = g + h)
A* 通过引入启发式方法 (Heuristic) 来解决“盲目性”问题。启发式是一种有根据的猜测。在寻路中,它是一个估计节点距离最终目的地有多远的函数。
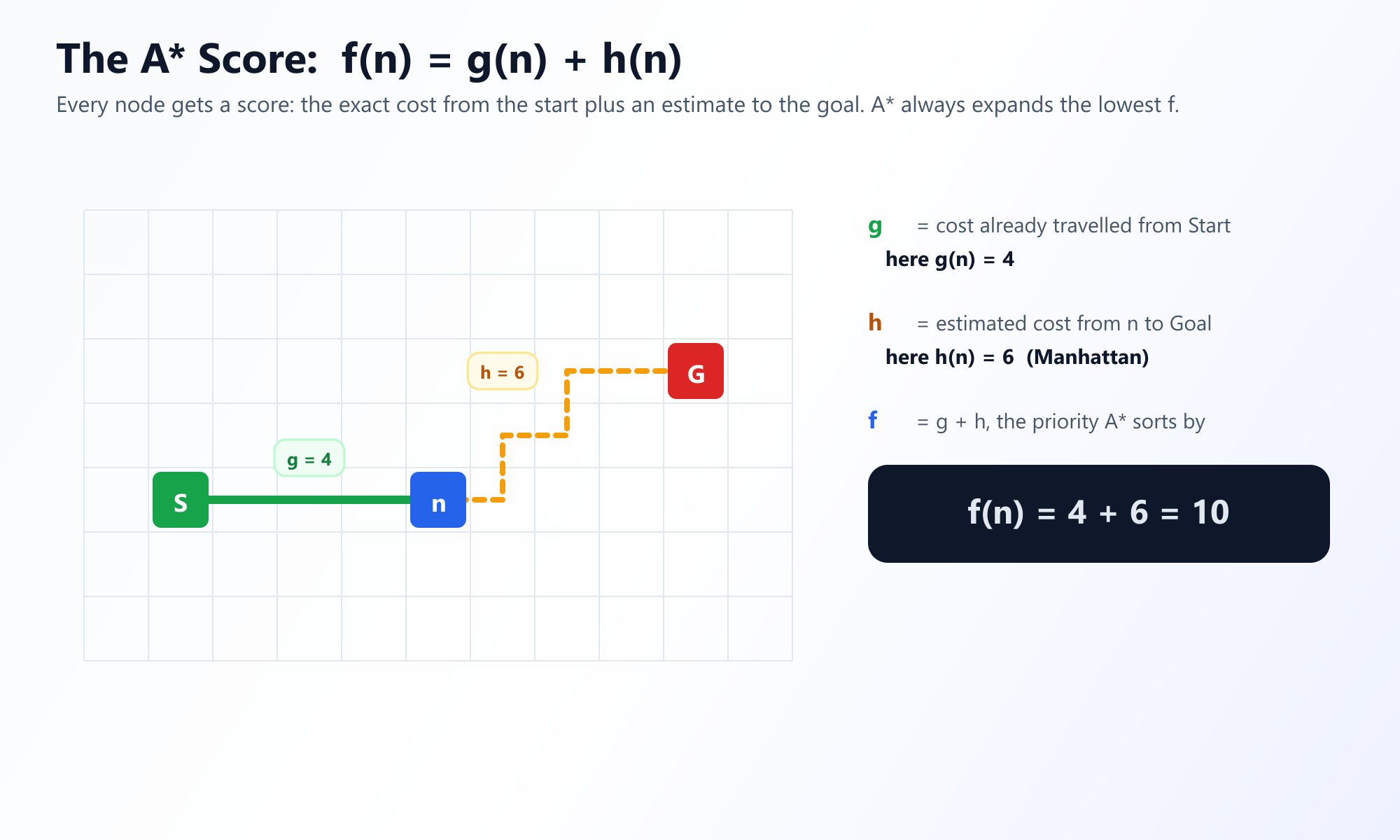
A* 为它发现的每个节点分配一个分数。分数最低的节点是它接下来要探索的节点。A* 的核心公式是:
n是图上当前正在评估的节点。g(n)是 实际成本 (Exact Cost)。它是从起始节点到节点n的已知距离。(这正是 Dijkstra 使用的)。h(n)是 启发式估计 (Heuristic Estimate)。它是从节点n到最终目标的估计距离。f(n)是 总成本 (Total Cost)。这是g和h的总和。A* 总是优先处理f分数最低的节点。
通过添加 h(n) 组件,A* 就像被磁铁吸引一样被拉向目标。它将忽略与目标方向相反的路径,与 Dijkstra 算法相比,大大减少了搜索空间。
4. 选择正确的启发式方法
A* 的魔力完全取决于启发式函数 h(n) 的准确性。如果你的启发式方法高估了到目标的距离,A* 就不再能保证找到最短路径。如果它低估了距离,它就会变慢。因此,为你特定的游戏或地图选择正确的启发式方法至关重要。
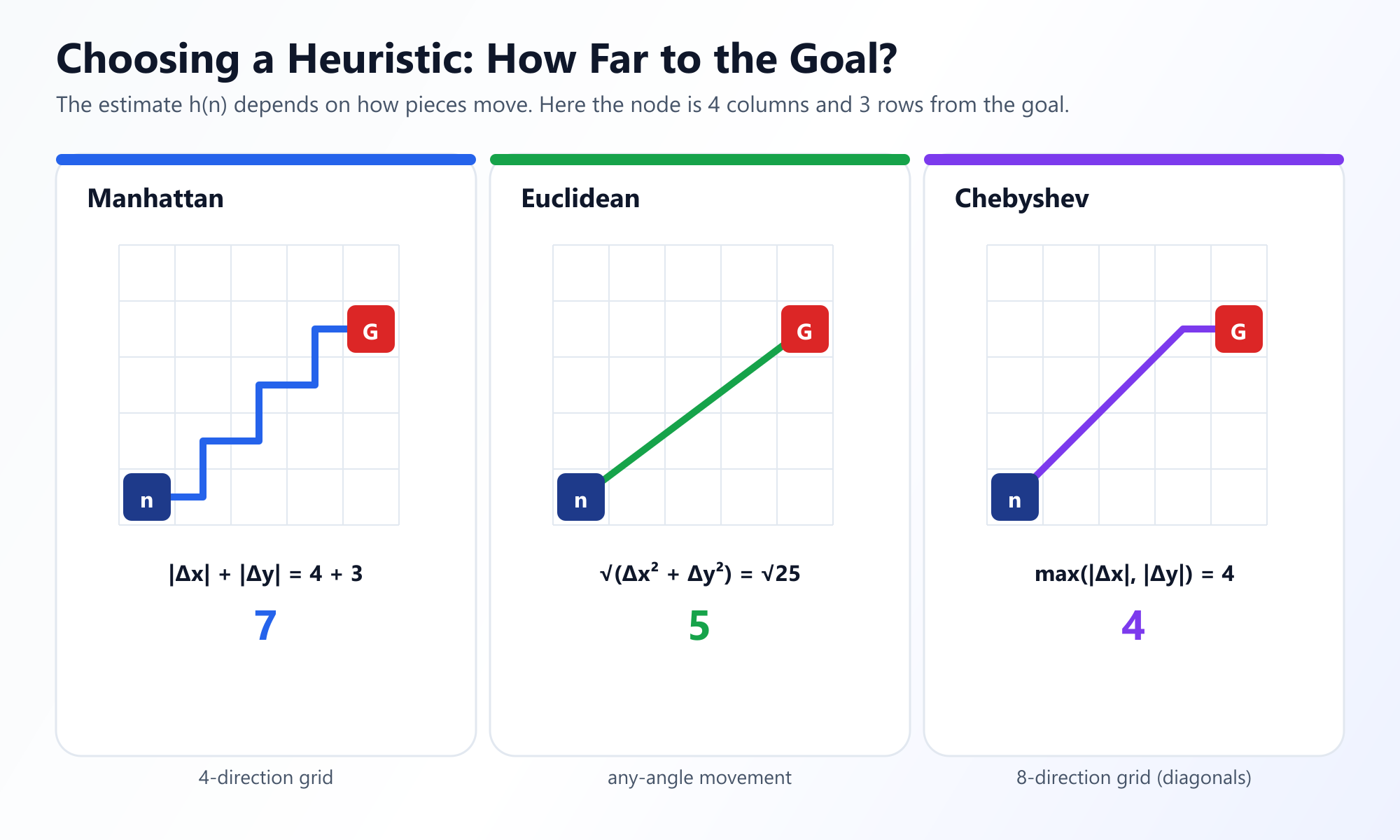
曼哈顿距离 (适用于没有对角线的网格世界)
如果您的游戏使用网格(如吃豆人或传统的 roguelike),并且角色只能向上、向下、向左或向右移动,则应使用曼哈顿距离。它计算当前节点和目标之间水平和垂直块的总数。
function heuristic(node, goal) {
return abs(node.x - goal.x) + abs(node.y - goal.y)
}欧几里得距离 (适用于开放世界或任意角度移动)
如果角色可以在任何方向上移动(或者如果你在连续的地图上进行路由),你应该使用欧几里得距离。这是使用勾股定理计算的两点之间的直线“直线”距离。
function heuristic(node, goal) {
return sqrt((node.x - goal.x)^2 + (node.y - goal.y)^2)
}切比雪夫距离 (适用于有对角线的网格世界)
如果您的游戏使用网格但允许对角线移动(其中对角线移动的成本与直线移动的成本相同),您可以使用切比雪夫距离。它取水平或垂直差异的最大值。
function heuristic(node, goal) {
return max(abs(node.x - goal.x), abs(node.y - goal.y))
}
5. A* 的逐步执行
以下正是该算法在执行过程中如何维护其状态和处理节点的:
- 初始化: 创建两个集合:一个
OPEN集合(要评估的节点)和一个CLOSED集合(已评估的节点)。将起始节点添加到OPEN集合。 - 循环开始: 在
OPEN集合中找到f成本最低的节点。我们称其为Current(当前)节点。 - 检查目标: 如果
Current节点是目标,您就完成了!向后跟随父指针以重建路径。 - 移动到 Closed: 从
OPEN集合中删除Current节点,并将其添加到CLOSED集合中。 - 扩展邻居: 查看
Current节点的所有相邻邻居。对于每个邻居:- 如果邻居是障碍物(墙)或在
CLOSED集合中,则忽略它。 - 计算邻居的
g成本(当前的g+ 到邻居的距离)。 - 如果邻居不在
OPEN集合中,则计算其h和f成本,将其父级设置为Current,并将其添加到OPEN集合中。 - 如果邻居已经在
OPEN集合中,请检查这条到邻居的新路径是否更好(具有更低的g成本)。如果是,请更新其父级和g成本。
- 如果邻居是障碍物(墙)或在
- 重复: 循环回到第 2 步。如果
OPEN集合变为空且尚未达到目标,则没有有效路径。
6. 游戏开发和 AI 中的实际应用
A* 是数字空间中移动的骨干。
- 实时战略 (RTS) 游戏: 当你在《星际争霸》或《帝国时代》中拖动选择 50 个单位并点击地图上的一个点时,A* 会计算出 50 条独立的路径,引导它们绕过建筑物、河流以及彼此。(通常利用诸如流场或分层 A* 等专业变体)。
- RPG 和潜行游戏: NPC 使用“NavMesh”(导航网格 - 一种可行走表面的简化图)上的 A* 来追逐玩家、在走廊中巡逻或寻找掩体。
- 机器人技术: 自动化仓库机器人(如亚马逊使用的机器人)使用 A* 在工厂车间导航,而不会与货架单元或其他机器人发生碰撞。
- GPS 导航: 虽然标准 A* 对于大陆地图来说太慢了,但修改版本(例如 ALT - 具有地标和三角不等式的 A*)用于快速计算最佳驾驶路线。
常见问题
A* 算法与 Dijkstra 算法有什么区别?
A* 算法使用启发式函数(估算到终点的距离)来引导路径搜索,而 Dijkstra 算法是盲目的,会向所有方向均匀探索。这使得 A* 更加快速和聚焦。
什么是 A* 中的可采纳启发式(Admissible Heuristic)?
可采纳启发式是指估算成本永远不会高出到达终点的实际成本。这一特性保证了 A* 能够找到数学上的最短路径。
什么时候该选择曼哈顿距离还是欧几里得距离?
如果网格中仅允许 4 个方向(上下左右)移动,请使用曼哈顿距离;如果允许任意角度的移动(两点间直线距离),请使用欧几里得距离。