
Table of Contents
- 1. What is the Traveling Salesperson Problem?
- 2. The Curse of Dimensionality: Combinatorial Explosion
- 3. P vs NP and NP-Hardness
- 4. Exact Algorithms: Held-Karp and Branch-and-Bound
- 5. Heuristics and Approximations: Good Enough, Fast Enough
- 6. Real-World Applications of TSP
- 7. Frequently Asked Questions (FAQ)
1. What is the Traveling Salesperson Problem?
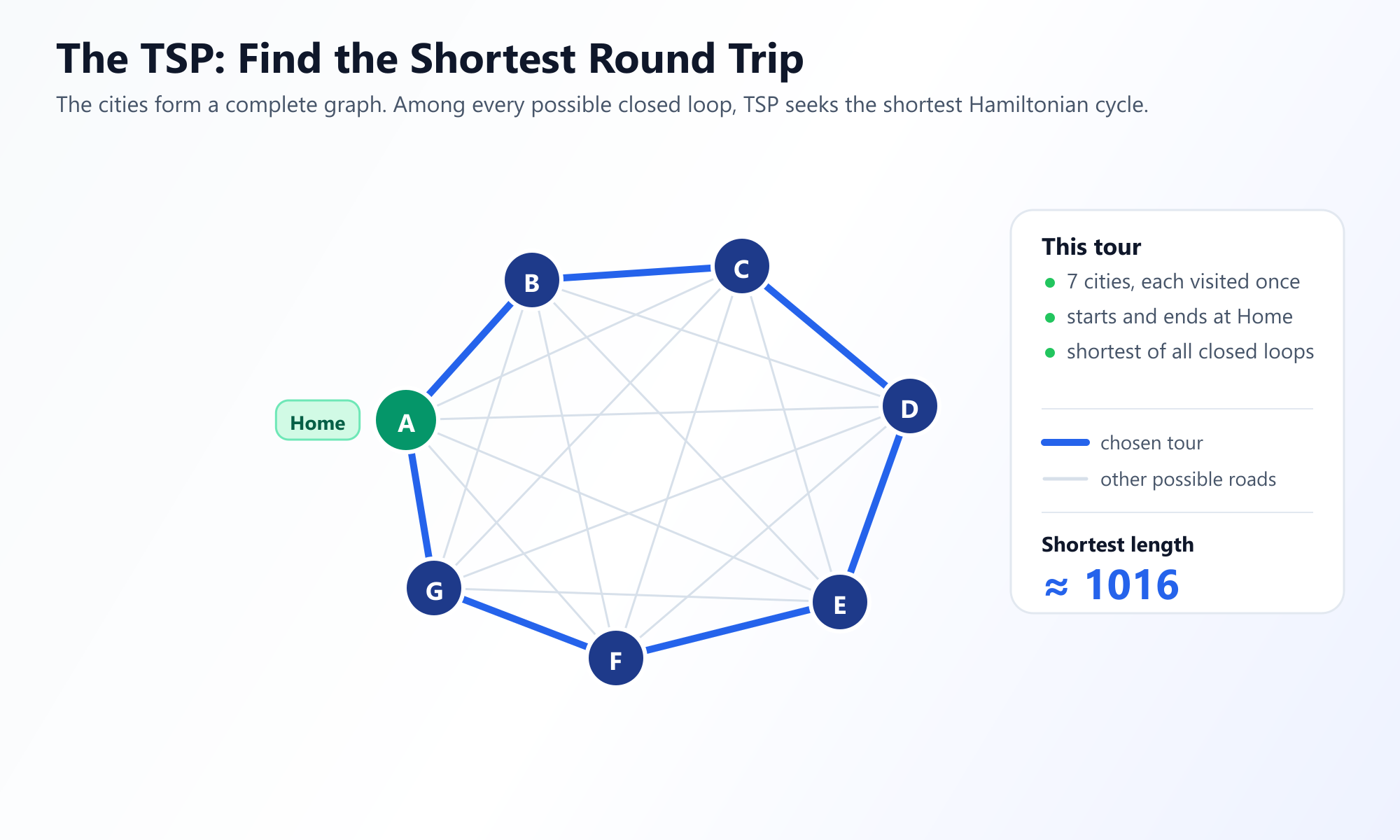
The Traveling Salesperson Problem (TSP) is a classic algorithmic problem in the field of computer science and operations research. The problem statement is deceptively simple to understand:
"Given a list of cities and the distances between each pair of cities, what is the shortest possible route that visits each city exactly once and returns to the origin city?"
In the language of Graph Theory, the TSP is formulated as follows: Given a complete, weighted graph (where vertices represent cities, edges represent roads, and weights represent distances), find a Hamiltonian Cycle of minimum total weight. A Hamiltonian Cycle is a closed loop that visits every vertex in a graph exactly once.
While calculating the distance of a single route involves simple addition, finding the absolute shortest route among all possible routes is what makes this problem notoriously difficult.
2. The Curse of Dimensionality: Combinatorial Explosion
Why can't we just use a computer to check every single route, calculate the total distance for each, and then pick the shortest one? This approach is called Brute Force.
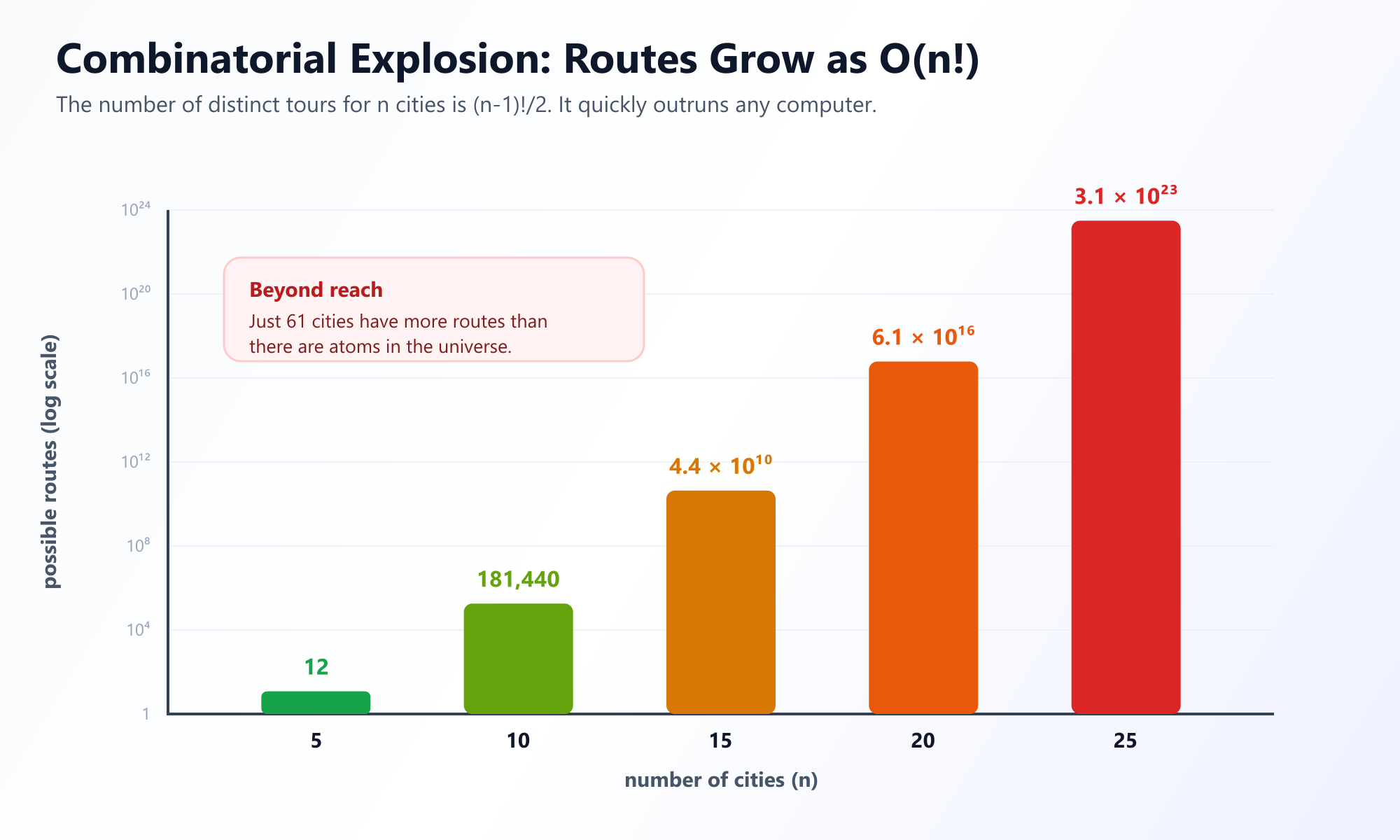
The issue with Brute Force is a mathematical phenomenon known as combinatorial explosion. The number of possible routes scales factorially with the number of cities.
- If you have 5 cities, there are
(5 - 1)! / 2 = 12possible routes. A human can calculate this on paper in a few minutes. - If you have 10 cities, there are
181,440possible routes. A modern computer can calculate this in a fraction of a millisecond. - If you have 20 cities, there are
60,822,550,204,416,000possible routes. This would take a standard computer a few years to compute. - If you have 61 cities, there are more possible routes than there are atoms in the observable universe.
Because the number of possible solutions grows at an astronomical O(n!) rate, brute-forcing the TSP is physically impossible for any significant number of cities, regardless of how fast supercomputers become.
3. P vs NP and NP-Hardness
The Traveling Salesperson Problem is classified as NP-Hard. Understanding what this means requires a brief look at computational complexity theory, specifically the P vs NP problem.
- P (Polynomial Time): Problems that can be solved relatively quickly (in polynomial time) by a computer. Examples include sorting an array or finding the shortest path between just two points (Dijkstra's algorithm).
- NP (Nondeterministic Polynomial Time): Problems where, if you are given a potential solution, you can verify if that solution is correct quickly (in polynomial time).
The decision version of TSP ("Does a route exist that is shorter than length L?") is in NP-Complete. The optimization version ("What is the absolute shortest route?") is NP-Hard. This implies that computer scientists strongly believe there is no algorithm that can find the exact shortest route for all cases of TSP in polynomial time. If anyone ever discovers a fast exact algorithm for TSP, they would prove that P = NP, winning a $1,000,000 Millennium Prize and fundamentally altering the foundation of computer security and mathematics.
4. Exact Algorithms: Holding Out for the Perfect Route
Despite the NP-Hard classification, researchers have developed clever algorithms that find the exact optimal solution much faster than brute force, though they still struggle as the number of cities grows large.
The Held-Karp Algorithm (Dynamic Programming)
Developed in 1962, the Held-Karp algorithm uses Dynamic Programming to solve the TSP exactly in O(n^2 * 2^n) time. While 2^n is still exponential (and therefore very slow for large inputs), it is drastically faster than the O(n!) time of brute force.
Held-Karp works by breaking the problem down into smaller overlapping subproblems. It calculates the shortest path from the start to a subset of cities, stores that result in memory (memoization), and reuses it to build the paths to larger subsets. However, because it must store results for every subset of cities, it requires O(n * 2^n) memory, which quickly becomes the limiting factor before processing power does.
Branch and Bound
Branch and Bound is another exact approach. It systematically enumerates candidate solutions using a tree structure. Before exploring a branch of the tree (a partial route), it calculates a "bound" (an optimistic estimate of the shortest possible route that could result from this branch). If this bound is already worse than the best route found so far, the algorithm "prunes" the branch, entirely skipping the evaluation of millions of useless routes.
Visualize TSP Solvers
Watch how different algorithms approach the same map of cities. See the brute force algorithm struggle, while heuristics find near-perfect routes in seconds.
Open the TSP Visualizer5. Heuristics and Approximations: Good Enough, Fast Enough
In the real world, companies like FedEx or Amazon do not need the absolute mathematically perfect route. A route that is 99% optimal but can be calculated in 5 seconds is infinitely more valuable than a 100% optimal route that takes 5,000 years to compute. This is where heuristics come in.
Nearest Neighbor (Greedy Algorithm)
The simplest heuristic is the Nearest Neighbor algorithm: Start at a random city, go to the nearest unvisited city, and repeat until you return home. It is incredibly fast O(n^2), but it can result in a "greedy trap," where taking short hops early on forces the salesperson to make massive cross-country jumps at the very end. It typically yields routes 25% longer than the optimal.
2-Opt Optimization
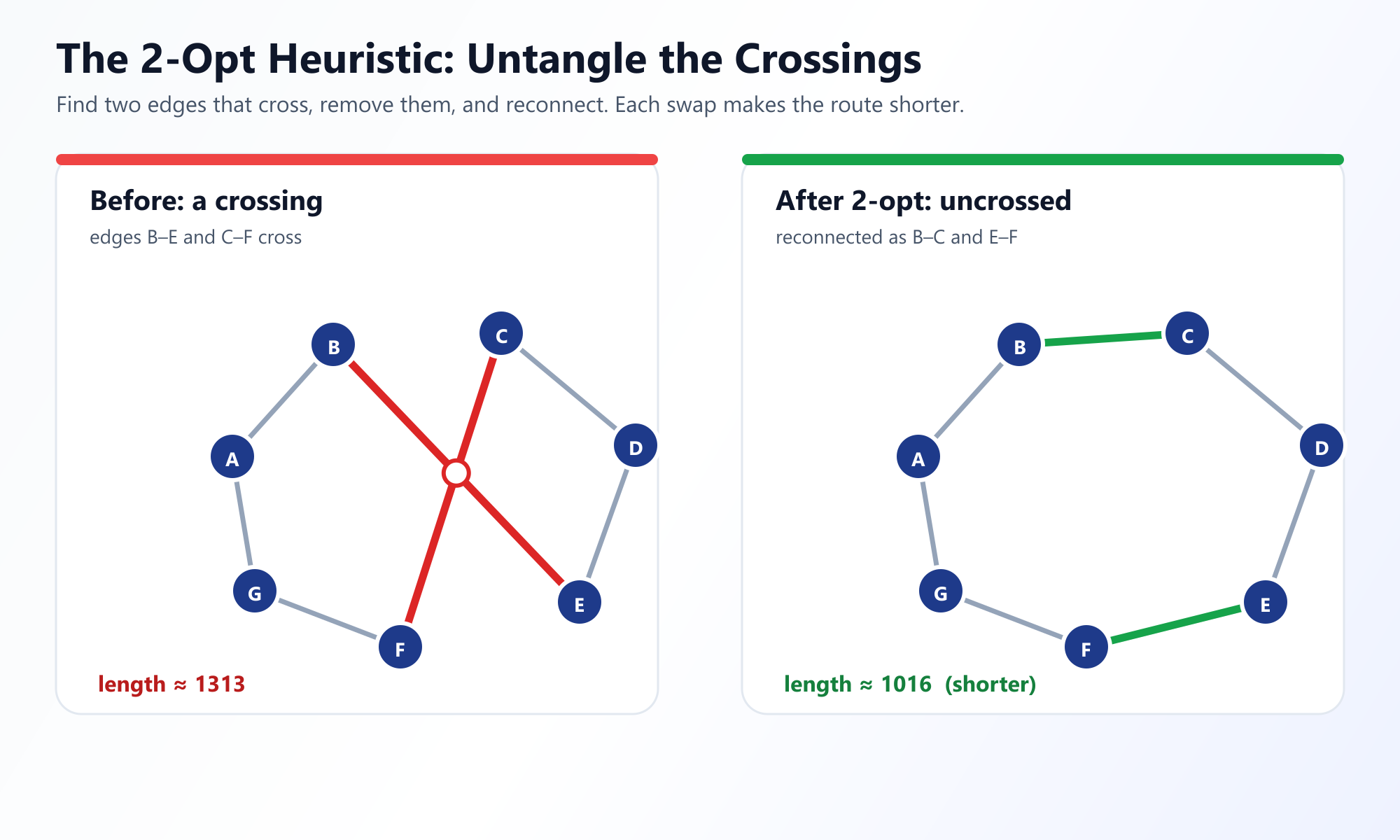
2-Opt is a local search algorithm. It takes an existing, possibly messy route, and attempts to untangle it. It looks at two edges (roads) in the route. If the roads cross each other, 2-Opt deletes those two edges and reconnects the cities in a way that removes the crossing. By repeatedly removing crossings, 2-Opt can take a poorly optimized route and turn it into a highly efficient one.
Ant Colony Optimization (ACO)
Inspired by nature, ACO simulates a colony of ants searching for food. Simulated "ants" wander the graph randomly. When an ant completes a tour, it lays down "pheromone" on the edges it traversed. The shorter the tour, the stronger the pheromone it leaves. Over time, subsequent ants are probabilistically drawn to edges with stronger pheromones. Through this decentralized positive feedback loop, the colony converges on highly optimized routes.
6. Real-World Applications of TSP
The mathematics of TSP apply far beyond a salesperson driving a car.
- Logistics and Delivery: The most obvious application. Companies routing delivery trucks, school buses, or garbage collection rely on massive TSP solvers to save millions of dollars in fuel and time.
- Manufacturing (Drilling Printed Circuit Boards): To manufacture a motherboard, a robotic drill must drill tens of thousands of tiny holes. Treating the holes as "cities", solving the TSP minimizes the distance the drill head must move, drastically speeding up production.
- Astronomy: Telescopes capturing images of different stars or galaxies must point at various locations in the sky. Formulating the observation schedule as a TSP minimizes the time the telescope spends re-orienting itself.
- DNA Sequencing: In bioinformatics, when piecing together fragmented DNA strands, the "cities" are DNA fragments, and the "distance" is a measure of how poorly they match. Solving a variation of TSP helps find the most likely sequence of the complete genome.
Frequently Asked Questions
What is the Traveling Salesperson Problem (TSP)?
TSP is the problem of finding the shortest possible route that visits a set of cities exactly once and returns to the starting city.
What makes TSP so difficult to solve exactly?
TSP is NP-hard. The number of possible routes grows factorially, O(n!), leading to a combinatorial explosion. For 20 cities, there are already trillions of routes to search.
What is the 2-Opt heuristic?
2-Opt is a local search heuristic that improves a TSP route by repeatedly taking two edges that cross each other, deleting them, and reconnecting them to untangle the route.