
Inhaltsverzeichnis
- 1. Was ist das Problem des Handlungsreisenden?
- 2. Der Fluch der Dimensionalität: Kombinatorische Explosion
- 3. P vs NP und NP-Schwere
- 4. Exakte Algorithmen: Held-Karp und Branch-and-Bound
- 5. Heuristiken und Approximationen: Gut genug, schnell genug
- 6. Reale Anwendungen von TSP
- 7. Häufig gestellte Fragen (FAQ)
1. Was ist das Problem des Handlungsreisenden?
Das Problem des Handlungsreisenden (Traveling Salesperson Problem, TSP) ist ein klassisches algorithmisches Problem im Bereich der Informatik und des Operations Research. Die Problemstellung ist täuschend einfach zu verstehen:
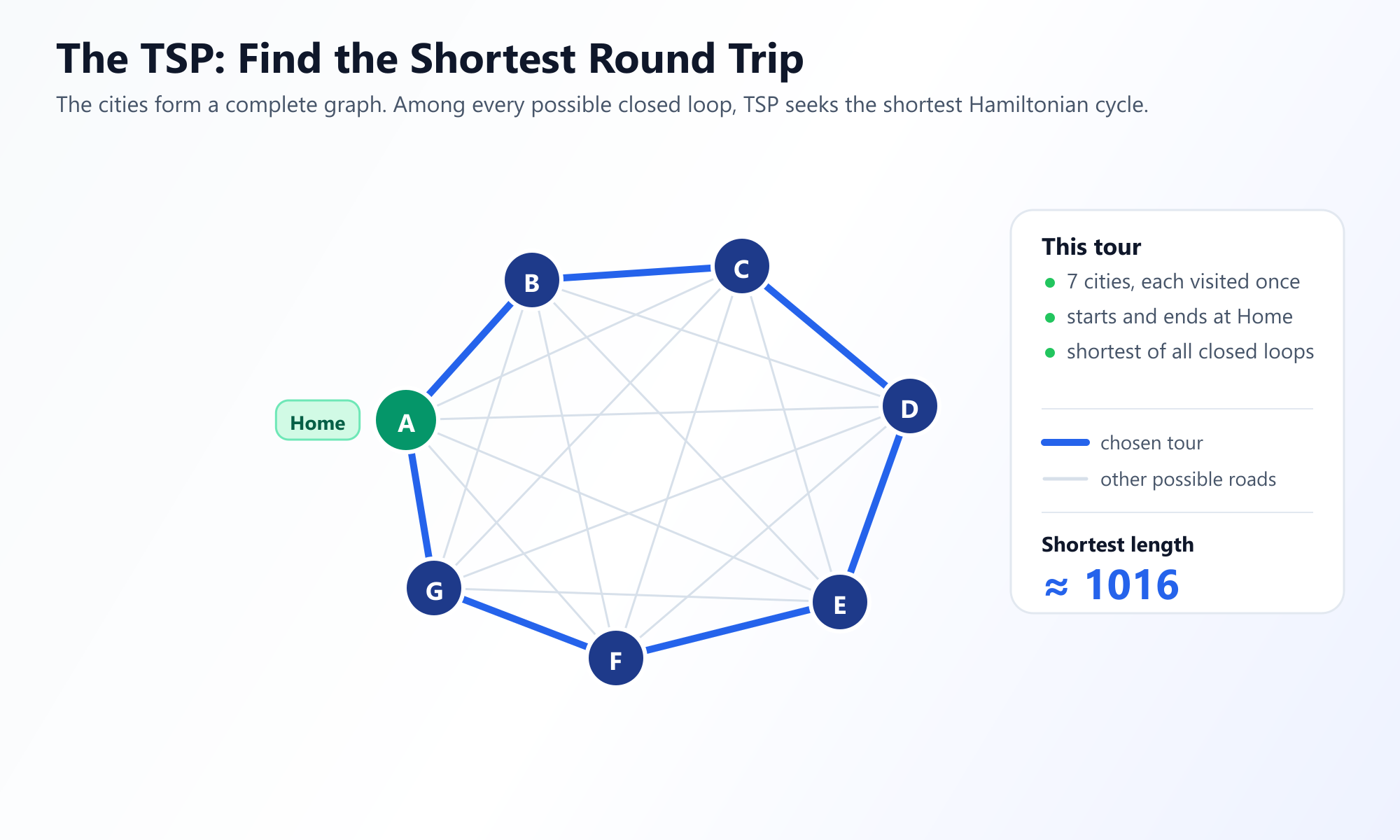
"Gegeben sei eine Liste von Städten und die Entfernungen zwischen jedem Paar von Städten. Was ist die kürzestmögliche Route, die jede Stadt genau einmal besucht und zur Ausgangsstadt zurückkehrt?"
In der Sprache der Graphentheorie wird das TSP wie folgt formuliert: Gegeben sei ein vollständiger, gewichteter Graph (wobei Knoten Städte repräsentieren, Kanten Straßen und Gewichte Entfernungen darstellen), finde einen Hamiltonkreis mit minimalem Gesamtgewicht. Ein Hamiltonkreis ist eine geschlossene Schleife, die jeden Knoten in einem Graphen genau einmal besucht.
Während die Berechnung der Entfernung einer einzelnen Route eine einfache Addition erfordert, ist es die Suche nach der absolut kürzesten Route unter allen möglichen Routen, die dieses Problem so berüchtigt schwer macht.
2. Der Fluch der Dimensionalität: Kombinatorische Explosion
Warum können wir nicht einfach einen Computer verwenden, um jede einzelne Route zu überprüfen, die Gesamtdistanz für jede zu berechnen und dann die kürzeste auszuwählen? Dieser Ansatz wird Brute-Force genannt.
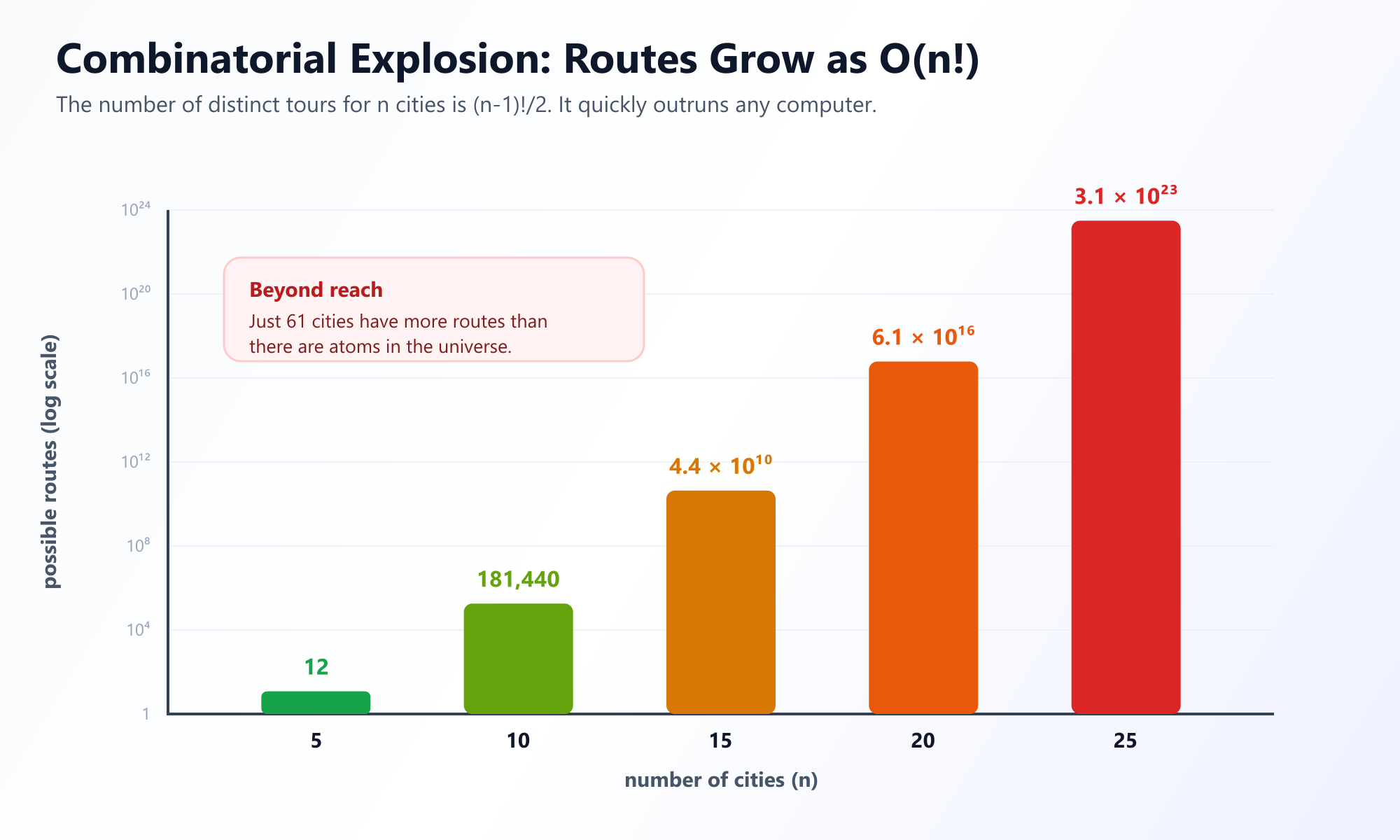
Das Problem bei Brute-Force ist ein mathematisches Phänomen, das als kombinatorische Explosion bekannt ist. Die Anzahl der möglichen Routen skaliert faktoriell mit der Anzahl der Städte.
- Wenn Sie 5 Städte haben, gibt es
(5 - 1)! / 2 = 12mögliche Routen. Ein Mensch kann dies in wenigen Minuten auf Papier berechnen. - Wenn Sie 10 Städte haben, gibt es
181.440mögliche Routen. Ein moderner Computer kann dies im Bruchteil einer Millisekunde berechnen. - Wenn Sie 20 Städte haben, gibt es
60.822.550.204.416.000mögliche Routen. Ein Standardcomputer bräuchte einige Jahre, um dies zu berechnen. - Wenn Sie 61 Städte haben, gibt es mehr mögliche Routen als Atome im beobachtbaren Universum.
Da die Anzahl der möglichen Lösungen mit einer astronomischen Rate von O(n!) wächst, ist das Brute-Forcing des TSP für jede signifikante Anzahl von Städten physikalisch unmöglich, unabhängig davon, wie schnell Supercomputer werden.
3. P vs NP und NP-Schwere
Das Problem des Handlungsreisenden ist als NP-schwer klassifiziert. Um zu verstehen, was das bedeutet, bedarf es eines kurzen Blicks in die Komplexitätstheorie, insbesondere auf das P-vs-NP-Problem.
- P (Polynomielle Zeit): Probleme, die von einem Computer relativ schnell (in polynomieller Zeit) gelöst werden können. Beispiele sind das Sortieren eines Arrays oder das Finden des kürzesten Pfades zwischen nur zwei Punkten (Dijkstra-Algorithmus).
- NP (Nichtdeterministische Polynomielle Zeit): Probleme, bei denen man, wenn einem eine mögliche Lösung gegeben wird, schnell (in polynomieller Zeit) verifizieren kann, ob diese Lösung korrekt ist.
Die Entscheidungsvariante des TSP ("Gibt es eine Route, die kürzer ist als Länge L?") ist NP-vollständig. Die Optimierungsvariante ("Was ist die absolut kürzeste Route?") ist NP-schwer. Dies impliziert, dass Informatiker stark davon ausgehen, dass es keinen Algorithmus gibt, der die exakte kürzeste Route für alle Fälle von TSP in polynomieller Zeit finden kann. Wenn jemals jemand einen schnellen, exakten Algorithmus für TSP entdecken würde, würde er beweisen, dass P = NP, den mit 1.000.000 $ dotierten Millennium-Preis gewinnen und die Grundlage der Computersicherheit und Mathematik grundlegend verändern.
4. Exakte Algorithmen: Auf die perfekte Route warten
Trotz der NP-Schwer-Klassifizierung haben Forscher clevere Algorithmen entwickelt, die die exakt optimale Lösung viel schneller als Brute-Force finden, obwohl sie immer noch Probleme haben, wenn die Anzahl der Städte groß wird.
Der Held-Karp-Algorithmus (Dynamische Programmierung)
Der 1962 entwickelte Held-Karp-Algorithmus verwendet Dynamische Programmierung, um das TSP exakt in O(n^2 * 2^n) Zeit zu lösen. Während 2^n immer noch exponentiell (und daher bei großen Eingaben sehr langsam) ist, ist es drastisch schneller als die O(n!)-Zeit von Brute-Force.
Held-Karp funktioniert, indem das Problem in kleinere, sich überlappende Teilprobleme zerlegt wird. Er berechnet den kürzesten Weg vom Start zu einer Teilmenge von Städten, speichert dieses Ergebnis im Speicher (Memoisation) und verwendet es wieder, um die Pfade zu größeren Teilmengen aufzubauen. Da er jedoch Ergebnisse für jede Teilmenge von Städten speichern muss, benötigt er O(n * 2^n) Speicher, was schnell zum begrenzenden Faktor wird, bevor es die Rechenleistung tut.
Branch and Bound
Branch and Bound (Verzweigen und Begrenzen) ist ein weiterer exakter Ansatz. Er zählt Lösungskandidaten systematisch mithilfe einer Baumstruktur auf. Bevor ein Zweig des Baumes (eine Teilroute) untersucht wird, berechnet er eine "Schranke" (eine optimistische Schätzung der kürzestmöglichen Route, die aus diesem Zweig resultieren könnte). Wenn diese Schranke bereits schlechter ist als die bisher beste gefundene Route, "schneidet" der Algorithmus den Zweig ab (Pruning) und überspringt die Auswertung von Millionen nutzloser Routen vollständig.
Visualisieren Sie TSP-Solver
Beobachten Sie, wie verschiedene Algorithmen an die gleiche Karte von Städten herangehen. Sehen Sie zu, wie der Brute-Force-Algorithmus kämpft, während Heuristiken in Sekunden nahezu perfekte Routen finden.
Öffnen Sie den TSP-Visualisierer5. Heuristiken und Approximationen: Gut genug, schnell genug
In der realen Welt benötigen Unternehmen wie FedEx oder Amazon nicht die absolut mathematisch perfekte Route. Eine Route, die zu 99 % optimal ist, aber in 5 Sekunden berechnet werden kann, ist unendlich viel wertvoller als eine zu 100 % optimale Route, deren Berechnung 5.000 Jahre dauert. Hier kommen Heuristiken ins Spiel.
Nächster Nachbar (Greedy-Algorithmus)
Die einfachste Heuristik ist der Nächste-Nachbar-Algorithmus (Nearest Neighbor): Starten Sie in einer zufälligen Stadt, gehen Sie zur nächsten unbesuchten Stadt und wiederholen Sie dies, bis Sie nach Hause zurückkehren. Er ist unglaublich schnell O(n^2), kann aber zu einer "Greedy-Falle" führen, bei der das Nehmen kurzer Sprünge zu Beginn den Reisenden zwingt, ganz am Ende massive Sprünge quer durchs Land zu machen. Er liefert typischerweise Routen, die 25 % länger sind als das Optimum.
2-Opt Optimierung
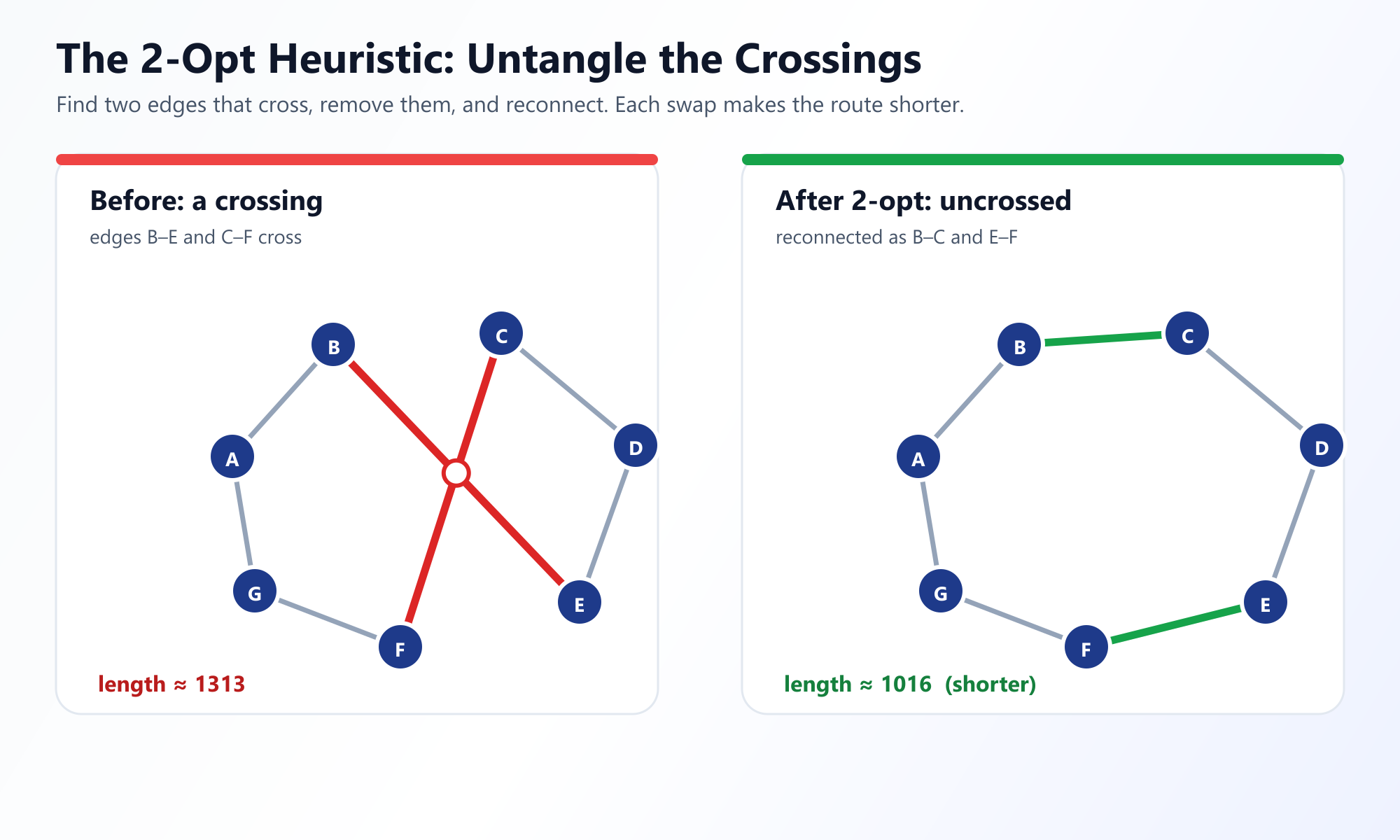
2-Opt ist ein lokaler Suchalgorithmus. Er nimmt eine bestehende, möglicherweise unordentliche Route und versucht, sie zu entwirren. Er betrachtet zwei Kanten (Straßen) in der Route. Wenn sich die Straßen kreuzen, löscht 2-Opt diese beiden Kanten und verbindet die Städte so neu, dass die Kreuzung entfernt wird. Durch wiederholtes Entfernen von Kreuzungen kann 2-Opt aus einer schlecht optimierten Route eine hocheffiziente machen.
Ameisenalgorithmus (Ant Colony Optimization, ACO)
Von der Natur inspiriert, simuliert ACO eine Ameisenkolonie auf der Suche nach Nahrung. Simulierte "Ameisen" wandern zufällig durch den Graphen. Wenn eine Ameise eine Tour beendet, legt sie auf den zurückgelegten Kanten "Pheromone" ab. Je kürzer die Tour, desto stärker das hinterlassene Pheromon. Im Laufe der Zeit werden nachfolgende Ameisen probabilistisch zu Kanten mit stärkeren Pheromonen hingezogen. Durch diese dezentrale positive Rückkopplungsschleife konvergiert die Kolonie auf hochoptimierte Routen.
6. Reale Anwendungen von TSP
Die Mathematik des TSP findet weit über einen autfahrenden Handlungsreisenden hinaus Anwendung.
- Logistik und Lieferung: Die offensichtlichste Anwendung. Unternehmen, die Lieferwagen, Schulbusse oder die Müllabfuhr routen, verlassen sich auf massive TSP-Solver, um Millionen von Dollar an Treibstoff und Zeit zu sparen.
- Fertigung (Bohren von Leiterplatten): Um ein Motherboard herzustellen, muss ein Roboterbohrer Zehntausende von winzigen Löchern bohren. Durch die Behandlung der Löcher als "Städte" minimiert die Lösung des TSP die Distanz, die sich der Bohrkopf bewegen muss, was die Produktion drastisch beschleunigt.
- Astronomie: Teleskope, die Bilder von verschiedenen Sternen oder Galaxien aufnehmen, müssen auf verschiedene Orte am Himmel gerichtet werden. Die Formulierung des Beobachtungsplans als TSP minimiert die Zeit, die das Teleskop für die Neuausrichtung aufwendet.
- DNA-Sequenzierung: In der Bioinformatik sind beim Zusammensetzen fragmentierter DNA-Stränge die "Städte" DNA-Fragmente, und die "Entfernung" ist ein Maß dafür, wie schlecht sie zusammenpassen. Die Lösung einer Variante des TSP hilft, die wahrscheinlichste Sequenz des vollständigen Genoms zu finden.
Häufig gestellte Fragen
Was ist das Problem des Handlungsreisenden (TSP)?
Das TSP sucht nach der kürzestmöglichen Route, die eine Reihe von Städten genau einmal besucht und zum Ausgangspunkt zurückkehrt.
Warum ist das TSP so schwer exakt zu lösen?
Das TSP ist NP-schwer. Die Anzahl der möglichen Routen wächst faktoriell O(n!), was zu einer kombinatorischen Explosion führt. Bei 20 Städten gibt es bereits Billiarden Routen.
Was ist die 2-Opt-Heuristik?
Eine lokale Suchheuristik, die eine TSP-Route verbessert, indem sie sich kreuzende Kanten entfernt und die Städte so neu verbindet, dass der Pfad entwirrt wird.