
Table des Matières
- 1. Qu'est-ce que le Problème du Voyageur de Commerce ?
- 2. La Malédiction de la Dimensionnalité : Explosion Combinatoire
- 3. P vs NP et Complexité NP-Difficile
- 4. Algorithmes Exacts : Held-Karp et Séparation et Évaluation
- 5. Heuristiques et Approximations : Assez Bon, Assez Rapide
- 6. Applications Réelles du TSP
- 7. Foire Aux Questions (FAQ)
1. Qu'est-ce que le Problème du Voyageur de Commerce ?
Le Problème du Voyageur de Commerce (Traveling Salesperson Problem, TSP) est un problème algorithmique classique dans le domaine de l'informatique et de la recherche opérationnelle. L'énoncé du problème est d'une simplicité trompeuse :
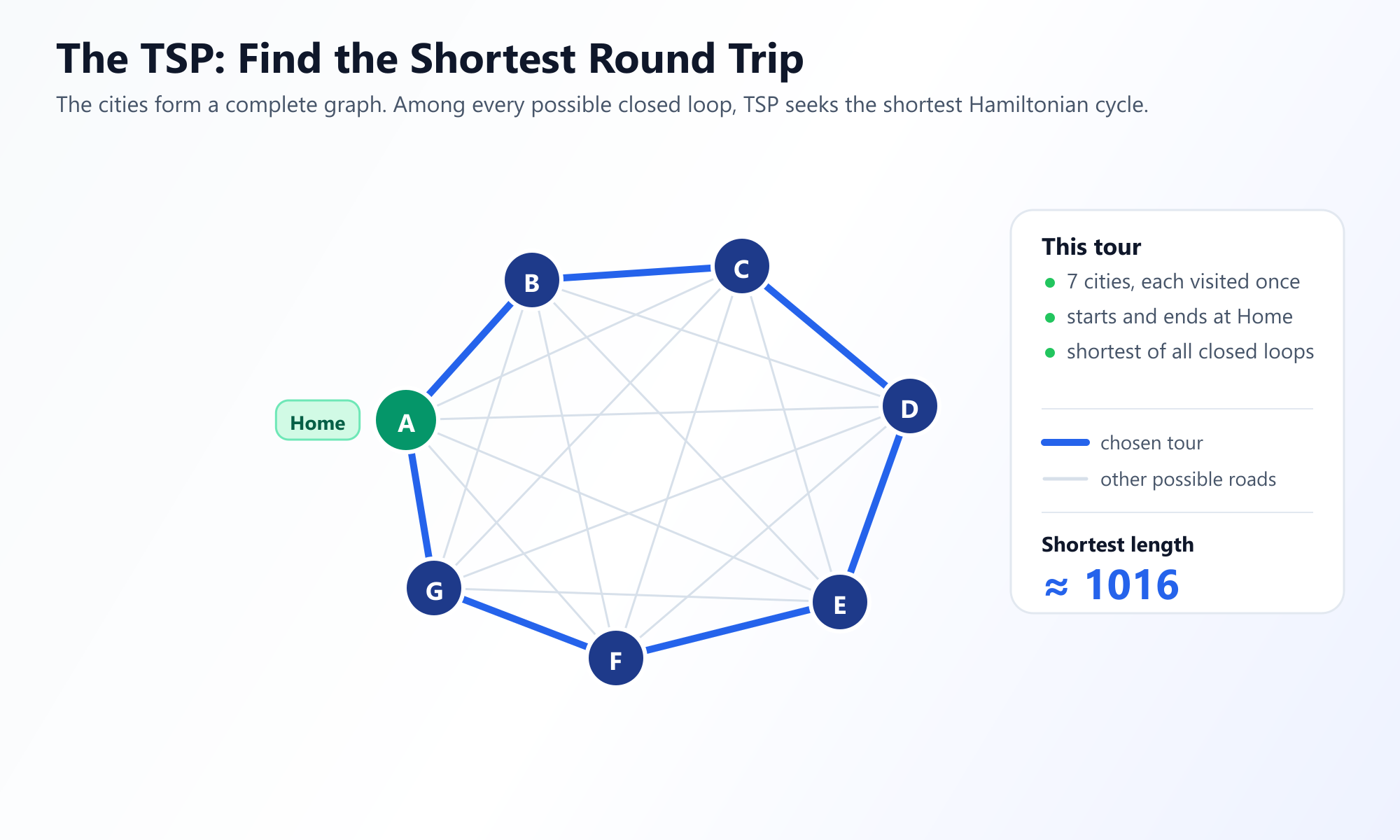
"Étant donné une liste de villes et les distances entre chaque paire de villes, quel est le chemin le plus court possible qui visite chaque ville exactement une fois et retourne à la ville d'origine ?"
Dans le langage de la Théorie des Graphes, le TSP est formulé comme suit : Étant donné un graphe complet et pondéré (où les sommets représentent des villes, les arêtes représentent des routes et les poids représentent des distances), trouver un Cycle Hamiltonien de poids total minimum. Un Cycle Hamiltonien est une boucle fermée qui visite chaque sommet d'un graphe exactement une fois.
Bien que le calcul de la distance d'un seul itinéraire implique une simple addition, trouver l'itinéraire absolument le plus court parmi tous les itinéraires possibles est ce qui rend ce problème notoirement difficile.
2. La Malédiction de la Dimensionnalité : Explosion Combinatoire
Pourquoi ne pouvons-nous pas simplement utiliser un ordinateur pour vérifier chaque itinéraire, calculer la distance totale pour chacun, puis choisir le plus court ? Cette approche est appelée la Force Brute (Brute Force).
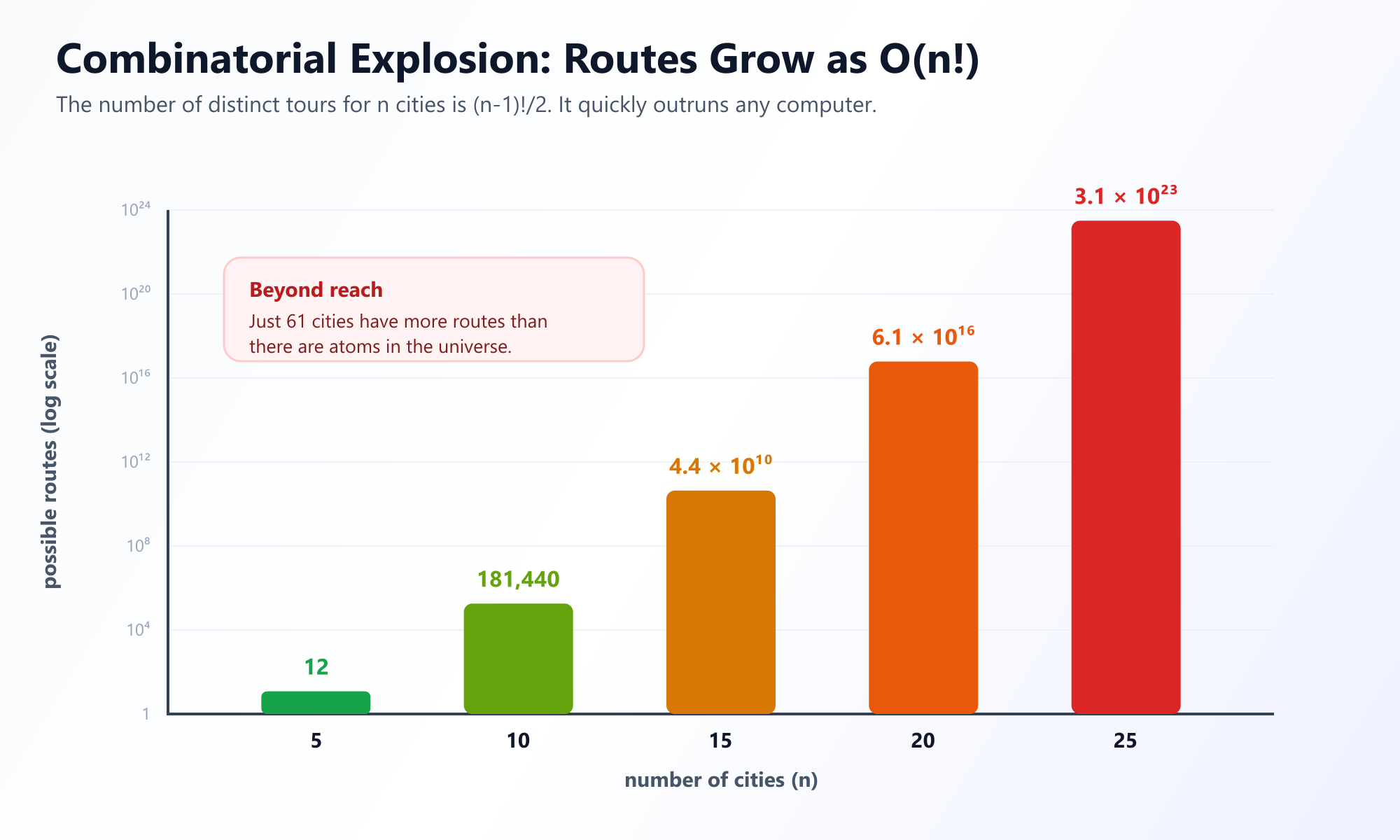
Le problème de la Force Brute est un phénomène mathématique connu sous le nom d'explosion combinatoire. Le nombre d'itinéraires possibles croît de manière factorielle avec le nombre de villes.
- Si vous avez 5 villes, il y a
(5 - 1)! / 2 = 12itinéraires possibles. Un humain peut calculer cela sur papier en quelques minutes. - Si vous avez 10 villes, il y a
181 440itinéraires possibles. Un ordinateur moderne peut calculer cela en une fraction de milliseconde. - Si vous avez 20 villes, il y a
60 822 550 204 416 000itinéraires possibles. Cela prendrait à un ordinateur standard quelques années à calculer. - Si vous avez 61 villes, il y a plus d'itinéraires possibles qu'il n'y a d'atomes dans l'univers observable.
Parce que le nombre de solutions possibles croît à un rythme astronomique de O(n!), utiliser la force brute pour le TSP est physiquement impossible pour un nombre significatif de villes, quelle que soit la vitesse des supercalculateurs.
3. P vs NP et Complexité NP-Difficile
Le Problème du Voyageur de Commerce est classé comme NP-Difficile (NP-Hard). Comprendre ce que cela signifie nécessite un bref aperçu de la théorie de la complexité algorithmique, en particulier le problème P vs NP.
- P (Temps Polynomial) : Problèmes qui peuvent être résolus relativement rapidement (en temps polynomial) par un ordinateur. Les exemples incluent le tri d'un tableau ou la recherche du chemin le plus court entre seulement deux points (Algorithme de Dijkstra).
- NP (Temps Polynomial Non Déterministe) : Problèmes où, si on vous donne une solution potentielle, vous pouvez vérifier si cette solution est correcte rapidement (en temps polynomial).
La version de décision du TSP ("Existe-il un itinéraire plus court que la longueur L ?") est NP-Complet. La version d'optimisation ("Quel est l'itinéraire absolument le plus court ?") est NP-Difficile. Cela implique que les informaticiens pensent fermement qu'il n'existe aucun algorithme capable de trouver l'itinéraire le plus court exact pour tous les cas du TSP en temps polynomial. Si quelqu'un découvrait un jour un algorithme exact et rapide pour le TSP, il prouverait que P = NP, remportant un Prix du millénaire de 1 000 000 $ et modifiant fondamentalement les fondements de la sécurité informatique et des mathématiques.
4. Algorithmes Exacts : Dans l'Attente de l'Itinéraire Parfait
Malgré la classification NP-Difficile, les chercheurs ont développé des algorithmes ingénieux qui trouvent la solution optimale exacte beaucoup plus rapidement que la force brute, bien qu'ils peinent encore lorsque le nombre de villes devient important.
L'Algorithme de Held-Karp (Programmation Dynamique)
Développé en 1962, l'algorithme de Held-Karp utilise la Programmation Dynamique pour résoudre le TSP exactement en un temps de O(n^2 * 2^n). Bien que 2^n soit toujours exponentiel (et donc très lent pour les grandes entrées), il est considérablement plus rapide que le temps O(n!) de la force brute.
Held-Karp fonctionne en décomposant le problème en sous-problèmes plus petits qui se chevauchent. Il calcule le chemin le plus court du départ à un sous-ensemble de villes, stocke ce résultat en mémoire (mémoïsation) et le réutilise pour construire les chemins vers des sous-ensembles plus grands. Cependant, comme il doit stocker les résultats pour chaque sous-ensemble de villes, il nécessite une mémoire de O(n * 2^n), ce qui devient rapidement le facteur limitant avant même la puissance de traitement.
Séparation et Évaluation (Branch and Bound)
La Séparation et Évaluation est une autre approche exacte. Elle énumère systématiquement les solutions candidates à l'aide d'une structure en arbre. Avant d'explorer une branche de l'arbre (un itinéraire partiel), elle calcule une "borne" (une estimation optimiste du chemin le plus court possible qui pourrait résulter de cette branche). Si cette borne est déjà pire que le meilleur itinéraire trouvé jusqu'à présent, l'algorithme "élague" (prunes) la branche, évitant totalement l'évaluation de millions d'itinéraires inutiles.
Visualisez les Solveurs TSP
Regardez comment différents algorithmes abordent la même carte de villes. Observez l'algorithme de force brute lutter, tandis que les heuristiques trouvent des itinéraires presque parfaits en quelques secondes.
Ouvrir le Visualiseur TSP5. Heuristiques et Approximations : Assez Bon, Assez Rapide
Dans le monde réel, des entreprises comme FedEx ou Amazon n'ont pas besoin de l'itinéraire absolument et mathématiquement parfait. Un itinéraire optimisé à 99 % mais qui peut être calculé en 5 secondes est infiniment plus précieux qu'un itinéraire optimisé à 100 % qui prend 5 000 ans à calculer. C'est là qu'interviennent les heuristiques.
Le Plus Proche Voisin (Algorithme Glouton)
L'heuristique la plus simple est l'algorithme du Plus Proche Voisin (Nearest Neighbor) : Commencez dans une ville au hasard, allez à la ville non visitée la plus proche, et répétez jusqu'à ce que vous rentriez chez vous. Il est incroyablement rapide O(n^2), mais il peut conduire à un "piège glouton", où faire de petits sauts au début oblige le voyageur à faire des sauts massifs à travers le pays à la toute fin. Il donne généralement des itinéraires 25 % plus longs que l'optimal.
Optimisation 2-Opt
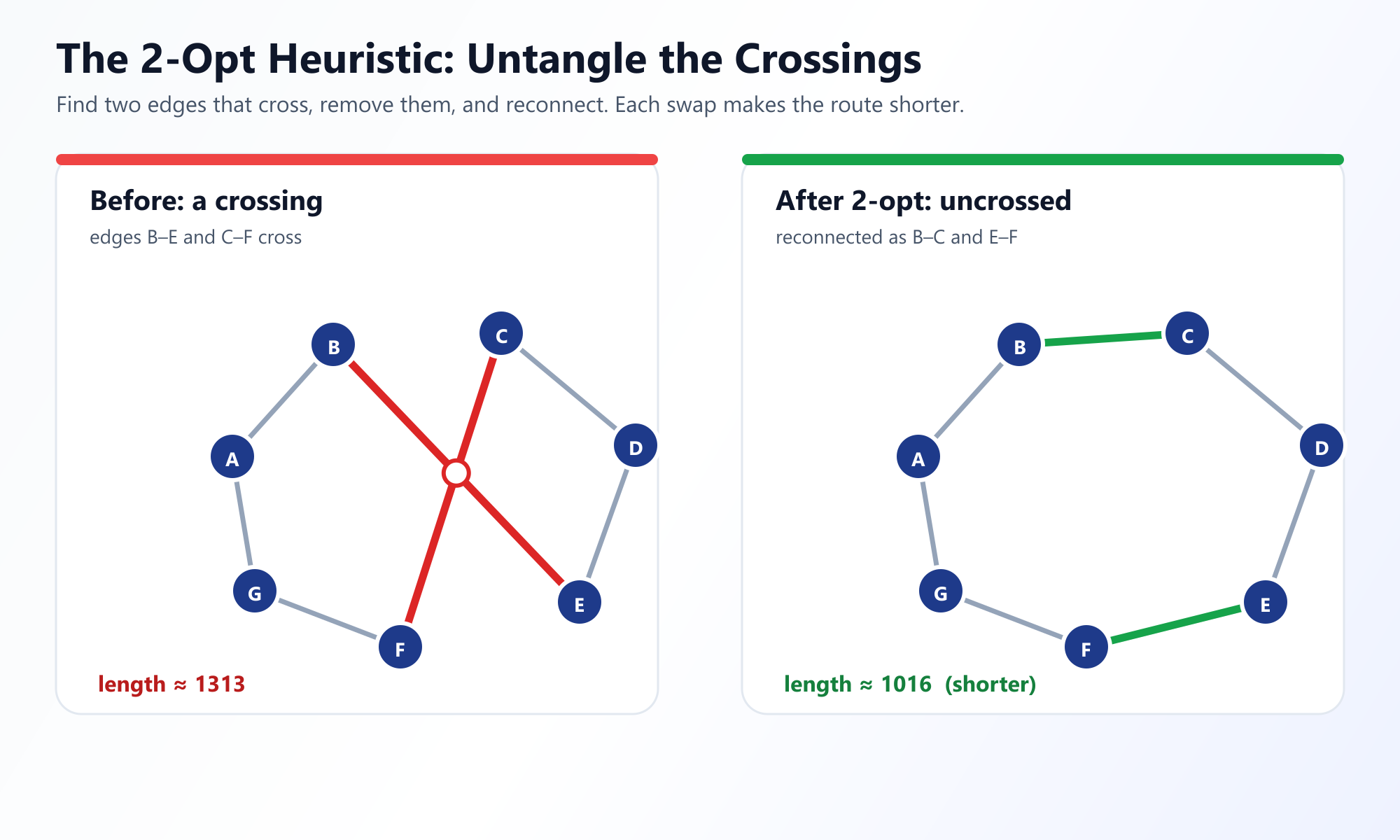
2-Opt est un algorithme de recherche locale. Il prend un itinéraire existant, éventuellement désordonné, et tente de le démêler. Il examine deux arêtes (routes) dans l'itinéraire. Si les routes se croisent, 2-Opt supprime ces deux arêtes et reconnecte les villes de manière à supprimer le croisement. En supprimant de manière répétée les croisements, 2-Opt peut prendre un itinéraire mal optimisé et le transformer en un itinéraire très efficace.
Optimisation par Colonie de Fourmis (ACO)
Inspiré par la nature, l'ACO simule une colonie de fourmis à la recherche de nourriture. Des "fourmis" simulées errent au hasard dans le graphe. Lorsqu'une fourmi termine une tournée, elle dépose des "phéromones" sur les arêtes qu'elle a traversées. Plus la tournée est courte, plus la phéromone laissée est forte. Au fil du temps, les fourmis suivantes sont attirées de manière probabiliste vers les arêtes avec des phéromones plus fortes. Grâce à cette boucle de rétroaction positive décentralisée, la colonie converge vers des itinéraires hautement optimisés.
6. Applications Réelles du TSP
Les mathématiques du TSP s'appliquent bien au-delà d'un vendeur conduisant une voiture.
- Logistique et Livraison : L'application la plus évidente. Les entreprises qui planifient les itinéraires des camions de livraison, des bus scolaires ou du ramassage des ordures s'appuient sur des solveurs TSP massifs pour économiser des millions de dollars en carburant et en temps.
- Fabrication (Perçage de Circuits Imprimés) : Pour fabriquer une carte mère, une perceuse robotisée doit percer des dizaines de milliers de trous minuscules. En traitant les trous comme des "villes", la résolution du TSP minimise la distance que la tête de perçage doit parcourir, accélérant considérablement la production.
- Astronomie : Les télescopes qui capturent des images de différentes étoiles ou galaxies doivent pointer vers divers endroits du ciel. Formuler le programme d'observation comme un TSP minimise le temps que le télescope passe à se réorienter.
- Séquençage de l'ADN : En bioinformatique, lors de l'assemblage de brins d'ADN fragmentés, les "villes" sont des fragments d'ADN, et la "distance" est une mesure de la façon dont ils s'emboîtent mal. La résolution d'une variante du TSP aide à trouver la séquence la plus probable du génome complet.
Foire aux questions
Qu'est-ce que le problème du voyageur de commerce (TSP) ?
Le TSP consiste à trouver le plus court chemin possible passant par un ensemble de villes exactement une fois avant de revenir à la ville de départ.
Pourquoi le TSP est-il si difficile à résoudre de manière exacte ?
Le TSP est NP-difficile. Le nombre de routes croît de façon factorielle O(n!), entraînant une explosion combinatoire. Pour 20 villes, il y a des trillions de possibilités.
Qu'est-ce que l'heuristique 2-Opt ?
2-Opt est une heuristique de recherche locale qui améliore une route en prenant deux arêtes qui se croisent, en les supprimant, puis en reconnectant les villes pour "démêler" le trajet.