
Table des Matières
- 1. Qu'est-ce que l'Algorithme A* ?
- 2. Le Problème avec l'Algorithme de Dijkstra
- 3. La Sauce Secrète : Les Heuristiques (f = g + h)
- 4. Choisir la Bonne Heuristique (Manhattan vs Euclidienne)
- 5. Exécution Étape par Étape d'A*
- 6. Applications Réelles dans le Dév. de Jeux & l'IA
- 7. Foire Aux Questions (FAQ)
1. Qu'est-ce que l'Algorithme A* ?
L'algorithme A* (prononcé "A-étoile" ou "A-Star") est un algorithme de parcours de graphe et de recherche de chemin qui est largement utilisé en informatique en raison de sa complétude, de son optimalité et de son efficacité optimale. Inventé en 1968 par Peter Hart, Nils Nilsson et Bertram Raphael du Stanford Research Institute, il a été conçu à l'origine pour aider le robot Shakey à naviguer dans des pièces.
Aujourd'hui, A* est la norme absolue de l'industrie pour le routage et la recherche de chemin (pathfinding). Qu'un personnage d'un jeu de stratégie marche sur une grille, ou qu'un GPS calcule le trajet le plus rapide à travers un pays, A* (ou une de ses variantes) fait probablement le gros du travail.
2. Le Problème avec l'Algorithme de Dijkstra
Pour comprendre pourquoi A* est brillant, nous devons d'abord comprendre ce qu'il améliore. Avant A*, la référence pour trouver le chemin le plus court était l'Algorithme de Dijkstra.
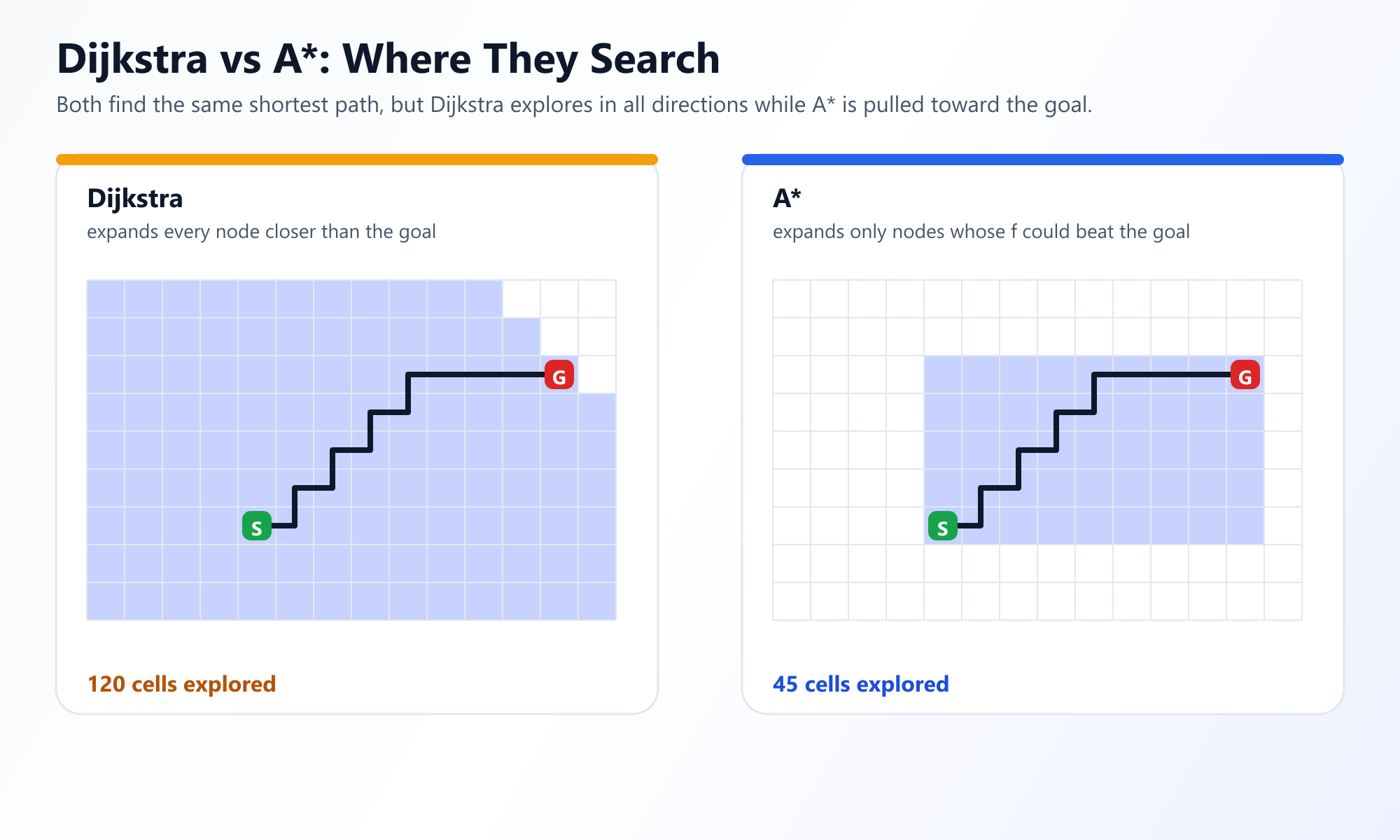
L'algorithme de Dijkstra est garanti pour trouver le chemin le plus court. Cependant, il est fondamentalement "aveugle". Lorsque vous demandez à Dijkstra de trouver un chemin de New York à Los Angeles, il explorera les routes menant à Boston, Miami et Chicago avec autant d'empressement qu'il explore les routes en direction de l'ouest. Il cherche vers l'extérieur en un cercle parfait (ou une sphère) dans toutes les directions de manière égale jusqu'à ce qu'il tombe accidentellement sur la cible.
Sur une grande carte, explorer toutes les directions possibles est incroyablement lent et gaspille d'énormes quantités de puissance de traitement. Nous avons besoin d'un algorithme suffisamment "intelligent" pour savoir dans quelle direction se trouve la cible, afin qu'il puisse donner la priorité à l'exploration des chemins qui se dirigent vers le but.
3. La Sauce Secrète : Les Heuristiques (f = g + h)
A* résout le problème de la "cécité" en introduisant une Heuristique. Une heuristique est une supposition éclairée. Dans la recherche de chemin, c'est une fonction qui estime à quelle distance un nœud se trouve de la destination finale.
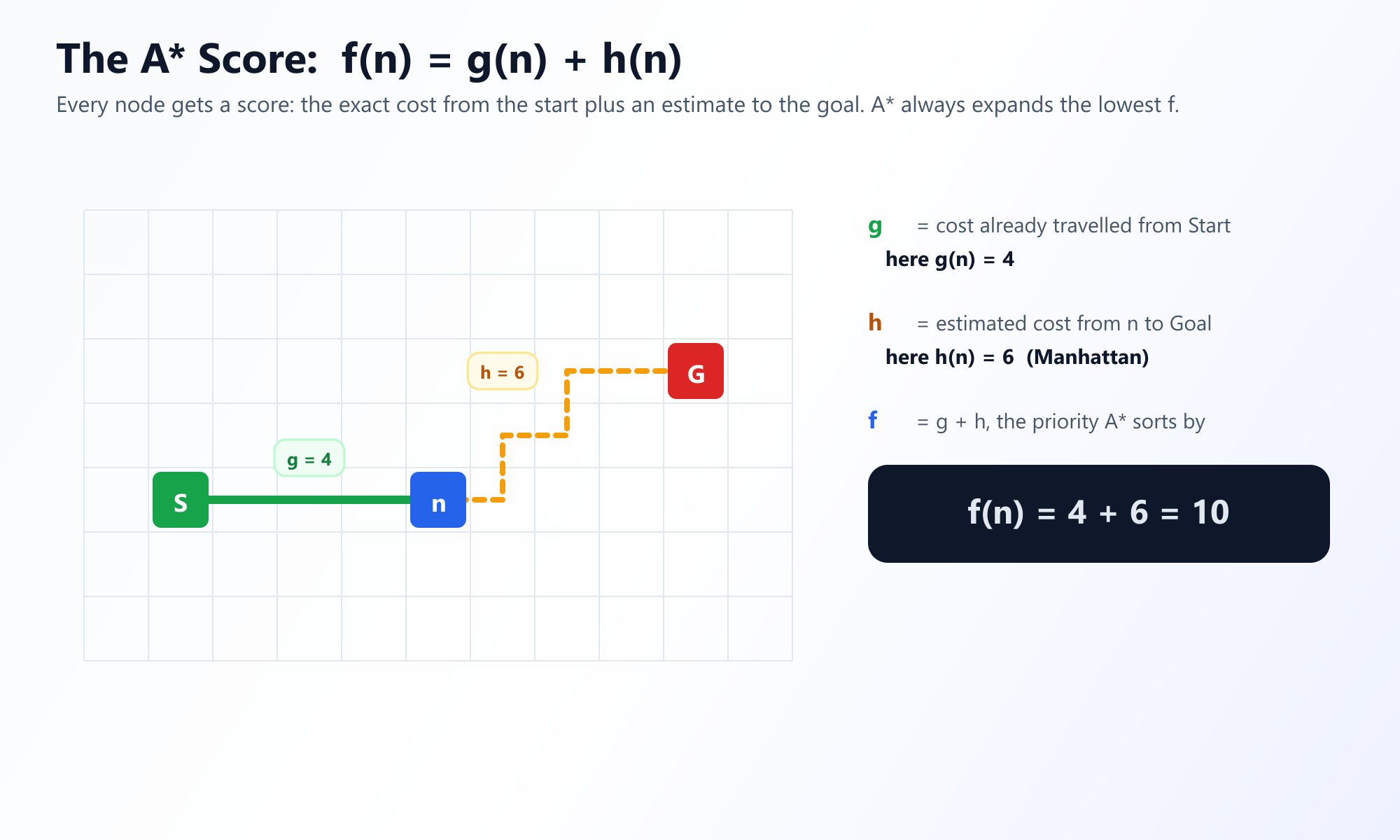
A* attribue un score à chaque nœud qu'il découvre. Le nœud avec le score le plus bas est celui qu'il explore ensuite. L'équation de base d'A* est :
nest le nœud actuel évalué sur le graphe.g(n)est le Coût Exact. C'est la distance connue du nœud de départ au nœudn. (C'est exactement ce qu'utilise Dijkstra).h(n)est l'Estimation Heuristique. C'est la distance estimée du nœudnau but final.f(n)est le Coût Total. C'est la somme degeth. A* donne toujours la priorité au nœud ayant le scorefle plus bas.
En ajoutant la composante h(n), A* est attiré vers le but comme un aimant. Il ignorera les chemins qui vont dans la direction opposée au but, réduisant considérablement l'espace de recherche par rapport à l'algorithme de Dijkstra.
4. Choisir la Bonne Heuristique
La magie d'A* repose entièrement sur la précision de la fonction heuristique h(n). Si votre heuristique surestime la distance jusqu'au but, A* n'est plus garanti de trouver le chemin le plus court. S'il la sous-estime, il devient plus lent. Par conséquent, choisir la bonne heuristique pour votre jeu ou carte spécifique est critique.
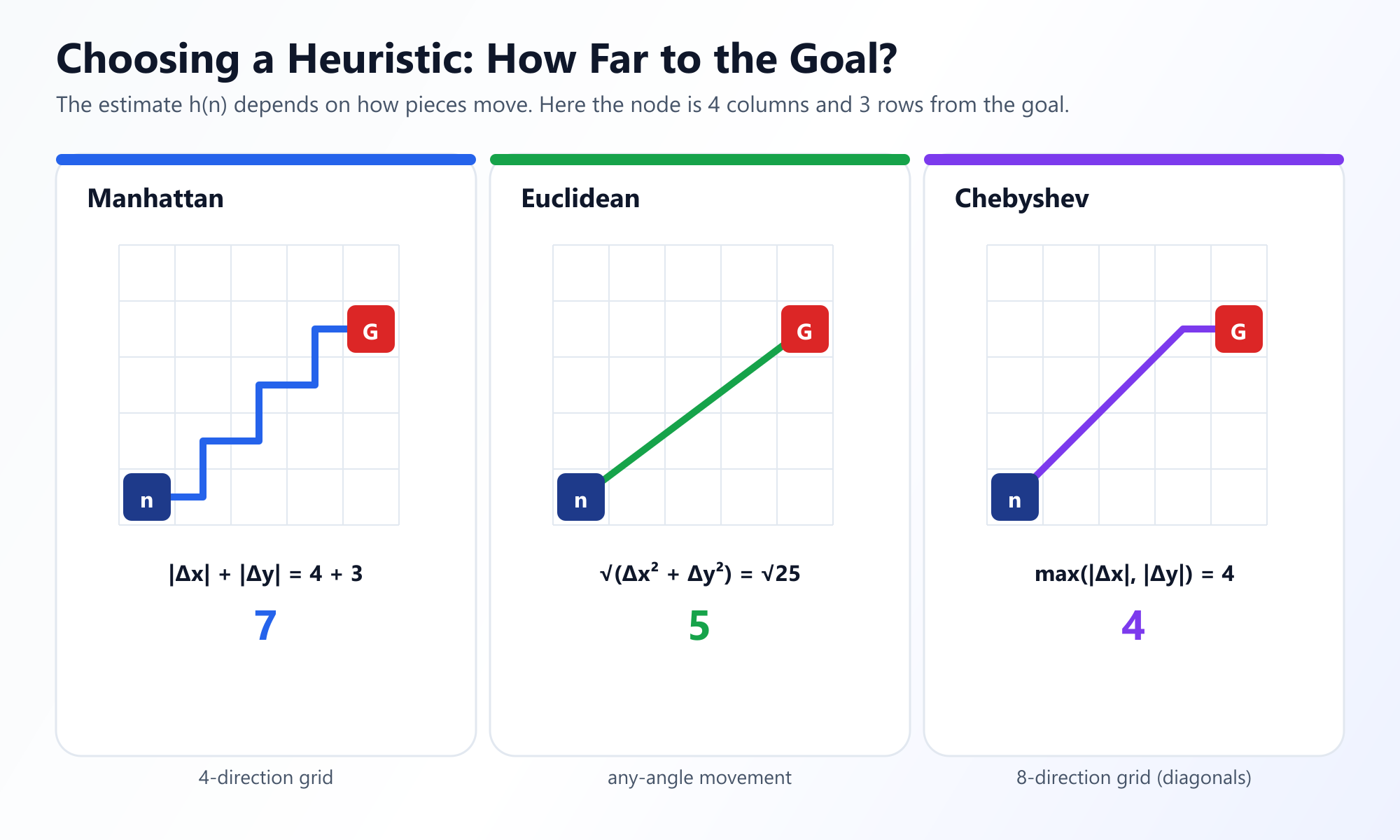
Distance de Manhattan (Pour les Mondes en Grille sans Diagonales)
Si votre jeu utilise une grille (comme Pac-Man ou un roguelike traditionnel) et que les personnages ne peuvent se déplacer que vers le Haut, le Bas, la Gauche ou la Droite, vous devez utiliser la Distance de Manhattan. Elle calcule le nombre total de blocs horizontalement et verticalement entre le nœud actuel et la cible.
function heuristic(node, goal) {
return abs(node.x - goal.x) + abs(node.y - goal.y)
}Distance Euclidienne (Pour les Mondes Ouverts ou les Mouvements à N'importe quel Angle)
Si les personnages peuvent se déplacer dans n'importe quelle direction (ou si vous routez sur une carte continue), vous devez utiliser la Distance Euclidienne. C'est la distance en ligne droite "à vol d'oiseau" entre deux points, calculée à l'aide du théorème de Pythagore.
function heuristic(node, goal) {
return sqrt((node.x - goal.x)^2 + (node.y - goal.y)^2)
}Distance de Tchebychev (Pour les Mondes en Grille avec Diagonales)
Si votre jeu utilise une grille mais autorise le mouvement diagonal (où se déplacer en diagonale coûte le même prix que de se déplacer tout droit), vous utilisez la distance de Tchebychev. Elle prend le maximum des différences horizontales ou verticales.
function heuristic(node, goal) {
return max(abs(node.x - goal.x), abs(node.y - goal.y))
}
Visualisez la Différence
Regardez Dijkstra et A* faire la course pour résoudre le même labyrinthe. Remarquez comment Dijkstra inonde la carte entière, tandis qu'A* crée un chemin concentré comme un laser directement vers la sortie.
Lancer le Visualiseur A*5. Exécution Étape par Étape d'A*
Voici exactement comment l'algorithme maintient son état et traite les nœuds pendant l'exécution :
- Initialisation : Créez deux ensembles : un ensemble
OPEN(nœuds à évaluer) et un ensembleCLOSED(nœuds déjà évalués). Ajoutez le nœud de départ à l'ensembleOPEN. - Début de Boucle : Trouvez le nœud dans l'ensemble
OPENavec le coûtfle plus bas. Appelons-le le nœudCurrent(Actuel). - Vérification du But : Si le nœud
Currentest le but cible, vous avez terminé ! Suivez les pointeurs parents vers l'arrière pour reconstruire le chemin. - Déplacer vers Closed : Supprimez le nœud
Currentde l'ensembleOPENet ajoutez-le à l'ensembleCLOSED. - Développer les Voisins : Regardez tous les voisins adjacents du nœud
Current. Pour chaque voisin :- Si le voisin est un obstacle (mur) ou se trouve dans l'ensemble
CLOSED, ignorez-le. - Calculez le coût
gdu voisin (gActuel + distance jusqu'au voisin). - Si le voisin n'est pas dans l'ensemble
OPEN, calculez ses coûtshetf, définissez son parent surCurrent, et ajoutez-le à l'ensembleOPEN. - Si le voisin est déjà dans l'ensemble
OPEN, vérifiez si ce nouveau chemin vers le voisin est meilleur (a un coûtgplus bas). Si c'est le cas, mettez à jour son parent et son coûtg.
- Si le voisin est un obstacle (mur) ou se trouve dans l'ensemble
- Répéter : Revenez à l'Étape 2. Si l'ensemble
OPENdevient vide et que le but n'a pas été atteint, il n'y a pas de chemin valide.
6. Applications Réelles dans le Dév. de Jeux & l'IA
A* est l'épine dorsale du mouvement dans les espaces numériques.
- Jeux de Stratégie en Temps Réel (RTS) : Lorsque vous sélectionnez 50 unités dans StarCraft ou Age of Empires et cliquez sur un point de la carte, A* calcule 50 chemins individuels, les acheminant autour des bâtiments, des rivières et les uns des autres. (Utilisant souvent des variantes spécialisées comme les Champs de Vecteurs (Flow Fields) ou A* Hiérarchique).
- RPG et Jeux Furtifs : Les PNJ utilisent A* sur un "NavMesh" (Maillage de Navigation - un graphe simplifié des surfaces praticables) pour poursuivre le joueur, patrouiller dans les couloirs ou trouver une couverture.
- Robotique : Les robots d'entrepôt automatisés (comme ceux utilisés par Amazon) utilisent A* pour naviguer sur les sols des usines sans entrer en collision avec les rayonnages ou d'autres robots.
- Navigation GPS : Bien que le A* standard soit trop lent pour les cartes continentales, des versions modifiées (comme ALT - A* avec Repères et Inégalité Triangulaire) sont utilisées pour calculer rapidement des itinéraires de conduite optimaux.
Foire aux questions
Comment l'algorithme A* se distingue-t-il de celui de Dijkstra ?
A* utilise une fonction heuristique (estimant la distance vers le but) pour guider sa recherche de chemin, tandis que Dijkstra est aveugle et explore dans toutes les directions. Cela rend A* beaucoup plus rapide et ciblé.
Qu'est-ce qu'une heuristique admissible dans A* ?
Une heuristique admissible est une fonction qui ne surestime jamais le coût réel pour atteindre l'objectif. L'admissibilité garantit que A* trouvera le chemin le plus court.
Quand choisir la distance de Manhattan plutôt que la distance euclidienne ?
Utilisez la distance de Manhattan pour les grilles où le mouvement est limité à 4 directions (haut, bas, gauche, droite). Utilisez la distance euclidienne pour les environnements continus permettant un mouvement dans toutes les directions.