
Tabla de Contenidos
1. Introducción al Problema del Camino Más Corto
En el vasto campo de las ciencias de la computación, muy pocos problemas tienen tanta aplicabilidad universal como el "Problema del Camino Más Corto". Ya sea Google Maps calculando la ruta más rápida a casa en tráfico pesado, o un enrutador de internet determinando cómo enviar un paquete de datos, la matemática subyacente es idéntica.
En su núcleo, el problema pregunta: Dado un grafo compuesto por nodos (ubicaciones) y aristas (caminos conectados) donde a cada arista se le asigna un "peso" (distancia, tiempo o costo), ¿cuál es el camino desde un nodo inicial hasta un nodo destino que minimiza el peso total?
Aunque este problema puede sonar sencillo, la naturaleza del grafo (si es dirigido, si contiene pesos negativos, o si tiene ciclos) cambia drásticamente, lo que requiere enfoques algorítmicos totalmente diferentes. En esta guía, desglosaremos los tres pilares de los algoritmos de caminos más cortos: Dijkstra, Bellman-Ford y Floyd-Warshall.
2. Algoritmo de Dijkstra: El Caballo de Batalla Voraz
Concebido por el legendario científico informático holandés Edsger W. Dijkstra en 1956, este algoritmo es el rey indiscutible del enrutamiento en redes informáticas y navegación de mapas.
La Estrategia: El algoritmo de Dijkstra utiliza un enfoque "voraz" (greedy). Siempre selecciona el nodo no visitado que está más cerca del origen, explora a sus vecinos y actualiza sus distancias. Una vez que se procesa un nodo, se termina permanentemente con él.
La Mecánica
Para encontrar eficientemente el nodo con la distancia más pequeña conocida, Dijkstra depende en gran medida de una Cola de Prioridad (Priority Queue) (a menudo implementada como un Min-Heap).
- Asigne a cada nodo un valor de distancia inicial:
0para el nodo de inicio, eInfinitopara todos los demás. - Inserte el nodo de inicio en la cola de prioridad.
- Mientras la cola no esté vacía, extraiga el nodo con la distancia más pequeña.
- Examine a todos los vecinos no visitados de este nodo.
- Calcule la distancia desde el origen a cada vecino a través del nodo actual.
- Si esta distancia recién calculada es menor que la distancia conocida del vecino, actualice la distancia del vecino e insértelo en la cola de prioridad.
Implementación en Python
import heapq
def dijkstra(graph, start):
# Inicializa las distancias al infinito
distances = {vertex: float('infinity') for vertex in graph}
distances[start] = 0
# La cola de prioridad almacena tuplas de (distancia, nodo)
pq = [(0, start)]
while pq:
# Extraer el nodo con la distancia más pequeña
current_distance, current_vertex = heapq.heappop(pq)
# Ignorar si ya encontramos un camino mejor
if current_distance > distances[current_vertex]:
continue
# Verificar los vecinos
for neighbor, weight in graph[current_vertex].items():
distance = current_distance + weight
# Si se encuentra un camino más corto, actualizar
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(pq, (distance, neighbor))
return distances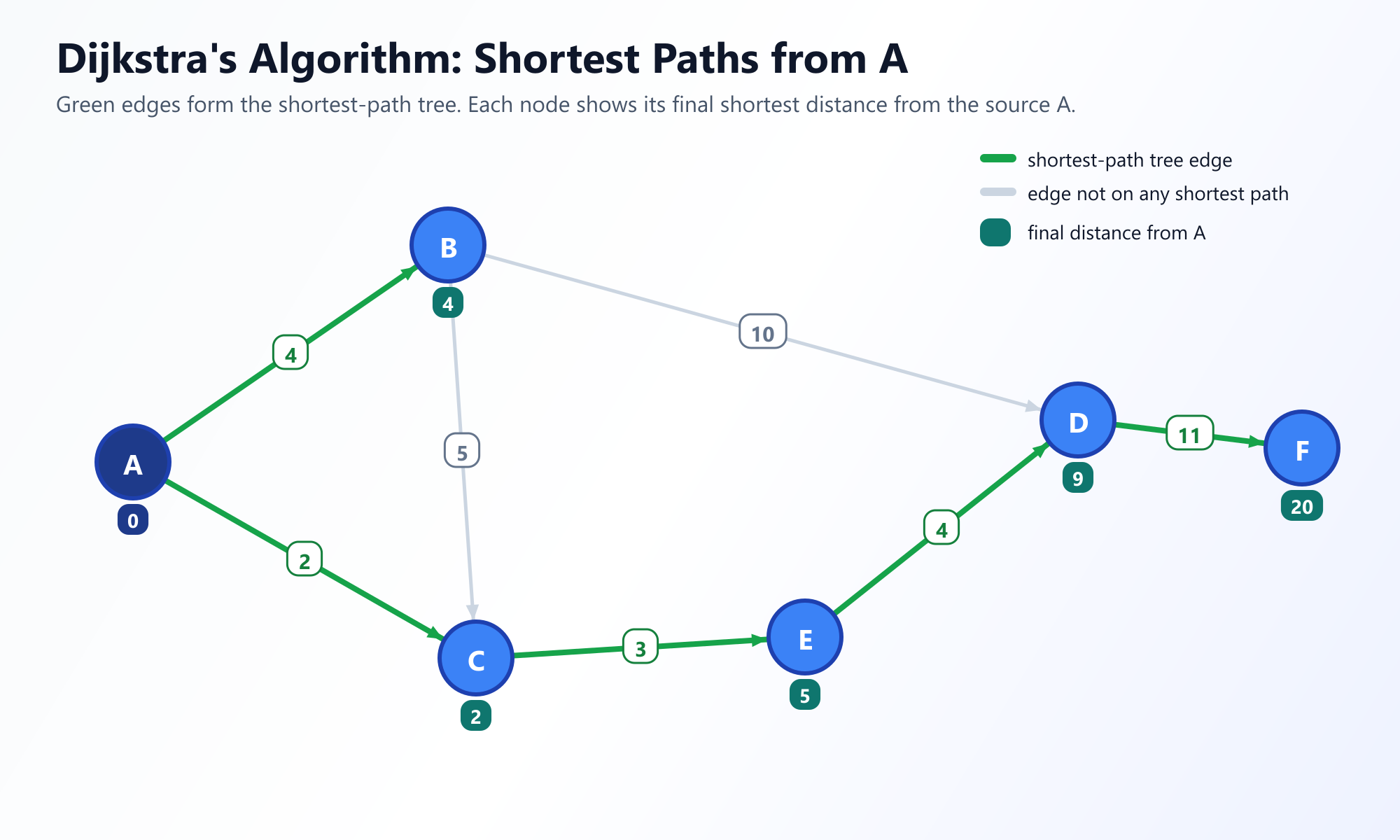
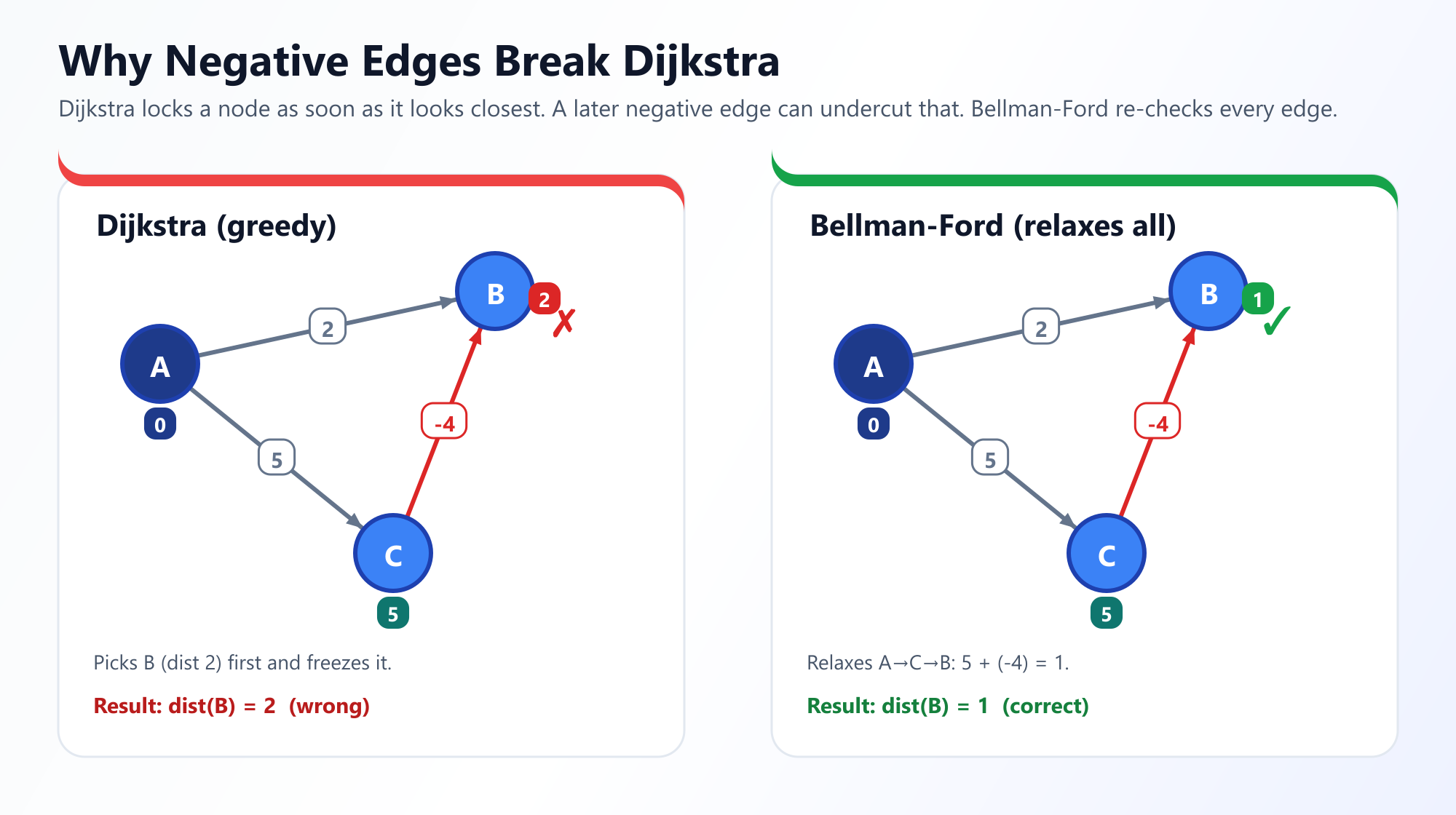
El Defecto Fatal: Pesos Negativos
La naturaleza voraz de Dijkstra es lo que lo hace increíblemente rápido (O((V + E) log V)). Sin embargo, esa avaricia tiene un defecto fatal: asume que agregar una arista a un camino nunca puede hacer que el camino sea más corto. Por lo tanto, Dijkstra falla estrepitosamente si el grafo contiene aristas con pesos negativos, porque una vez que se "termina" con un nodo, nunca se reconsidera, incluso si una arista negativa oculta lo hiciera más barato más adelante.
Vea la Cola de Prioridad de Dijkstra en Acción
Observar cómo Dijkstra prioriza sistemáticamente los nodos de menor puntuación es fascinante. Vea la búsqueda voraz desplegarse visualmente.
Iniciar Visualizador Interactivo de Dijkstra3. Algoritmo de Bellman-Ford: Manejando lo Negativo
Cuando no se puede garantizar que los pesos de las aristas sean todos positivos (por ejemplo, modelar transacciones financieras donde algunas transacciones dan ganancias en lugar de costos), Bellman-Ford entra en escena. Mientras que Dijkstra es un algoritmo voraz, Bellman-Ford utiliza un enfoque de Programación Dinámica (Dynamic Programming).
La Estrategia: En lugar de elegir inteligentemente el nodo más cercano, Bellman-Ford adopta un enfoque de mazo: simplemente "relaja" (actualiza las distancias para) cada arista en el grafo. Y lo hace V - 1 veces.
¿Por qué V - 1 Iteraciones?
El camino más largo posible en un grafo sin ciclos puede tener como máximo V - 1 aristas (donde V es el número de vértices). Al relajar todas las aristas V - 1 veces, el algoritmo garantiza que las distancias se ajustarán a sus valores absolutamente más cortos, incluso si el camino tuvo que atravesar un laberinto de aristas negativas.
Detección de Ciclos Negativos
El mayor superpoder de Bellman-Ford es su capacidad para detectar ciclos de pesos negativos. Si después de V - 1 iteraciones, relajas las aristas una vez más y una distancia todavía disminuye, eso significa que el grafo tiene un ciclo negativo (un bucle infinito que disminuye el costo para siempre, como un arbitraje de dinero infinito). El "camino más corto" es matemáticamente indefinido en tales casos.
Implementación en Python
def bellman_ford(graph, V, start):
# Inicializar distancias
distances = {vertex: float('infinity') for vertex in range(V)}
distances[start] = 0
# Relajar todas las aristas V - 1 veces
for _ in range(V - 1):
for u, v, w in graph:
if distances[u] != float('infinity') and distances[u] + w < distances[v]:
distances[v] = distances[u] + w
# Ejecutar una vez más (la V-ésima vez) para verificar ciclos negativos
for u, v, w in graph:
if distances[u] != float('infinity') and distances[u] + w < distances[v]:
print("¡El grafo contiene un ciclo de pesos negativos!")
return None
return distances4. Algoritmo de Floyd-Warshall: La Solución para Todos los Pares
Tanto Dijkstra como Bellman-Ford son algoritmos de camino más corto de origen único (encuentran el camino desde un punto de inicio hasta todos los demás puntos). ¿Qué pasa si necesitas saber el camino más corto de cada nodo a cada otro nodo al mismo tiempo?
El algoritmo de Floyd-Warshall proporciona una alternativa increíblemente elegante. Es otro enfoque de Programación Dinámica, pero opera sobre toda la matriz de adyacencia del grafo.
La Estrategia: Floyd-Warshall verifica sistemáticamente si tomar la ruta a través de un nodo intermediokes más corto que la ruta actualmente conocida del nodoial nodoj.
La elegancia de este algoritmo radica en sus tres bucles anidados notablemente simples. Es extremadamente fácil de implementar y es excelente para grafos densos.
![El paso central de relajación de Floyd-Warshall. Un triángulo de nodos i, j y k. La arista directa i a j tiene peso 8, mientras que el camino i a k a j cuesta 3 más 2 igual a 5. Como 5 es menor, dist[i][j] se actualiza de 8 a 5.](/articles/img/floyd-warshall-relaxation.png)
Implementación en Python
def floyd_warshall(graph_matrix, V):
# Crear una copia de la matriz del grafo para almacenar distancias
dist = [[float('infinity') for _ in range(V)] for _ in range(V)]
# Establecer casos base
for i in range(V):
dist[i][i] = 0
for u in range(V):
for v in range(V):
if graph_matrix[u][v] != 0:
dist[u][v] = graph_matrix[u][v]
# El algoritmo central
for k in range(V):
for i in range(V):
for j in range(V):
# Si el camino a través de 'k' es más corto, actualizar el camino
dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j])
return dist5. Comparación Completa
| Algoritmo | Complejidad Temporal | ¿Soporta Pesos Negativos? | Mejor Caso de Uso |
|---|---|---|---|
| Dijkstra | O((V + E) log V) |
No | Navegación GPS, Enrutamiento IP (OSPF). Grafos grandes y no negativos. |
| Bellman-Ford | O(V * E) |
Sí (Detecta ciclos) | Enrutamiento Vector-Distancia (RIP), Arbitraje financiero. |
| Floyd-Warshall | O(V³) |
Sí | Matrices de redes de vuelos, grafos densos donde se necesitan las respuestas de todos los pares. |
Preguntas frecuentes
¿Cómo difieren los algoritmos de Dijkstra y Bellman-Ford?
Dijkstra es voraz, corre en O((V + E) log V) pero falla con pesos negativos. Bellman-Ford corre en O(VE), maneja pesos negativos y detecta ciclos negativos.
¿Para qué se utiliza el algoritmo de Floyd-Warshall?
Es un algoritmo de caminos cortos de todos contra todos. Encuentra las distancias más cortas entre cualquier pareja de nodos en un tiempo O(V³) usando programación dinámica.
¿Cómo optimiza el algoritmo A* la búsqueda de caminos más cortos?
A* optimiza la búsqueda utilizando heurísticas que estiman la distancia restante al objetivo, dirigiendo la exploración hacia la meta en lugar de avanzar a ciegas.