
Tabla de Contenidos
1. ¿Qué es el Algoritmo A*?
El algoritmo A* (pronunciado "A-Estrella") es un algoritmo de recorrido de grafos y búsqueda de rutas que se usa ampliamente en informática debido a su completitud, optimalidad y eficiencia óptima. Inventado en 1968 por Peter Hart, Nils Nilsson y Bertram Raphael del Instituto de Investigación de Stanford, fue diseñado originalmente para ayudar al robot Shakey a navegar por las habitaciones.
Hoy en día, A* es el estándar absoluto de la industria para el enrutamiento y la búsqueda de rutas. Ya sea que un personaje en un juego de estrategia esté caminando por una cuadrícula, o que un GPS esté calculando el viaje más rápido a través de un país, es probable que A* (o una variante del mismo) esté haciendo el trabajo pesado.
2. El Problema con el Algoritmo de Dijkstra
Para entender por qué A* es brillante, primero debemos entender qué mejora. Antes de A*, el estándar de oro para encontrar el camino más corto era el Algoritmo de Dijkstra.
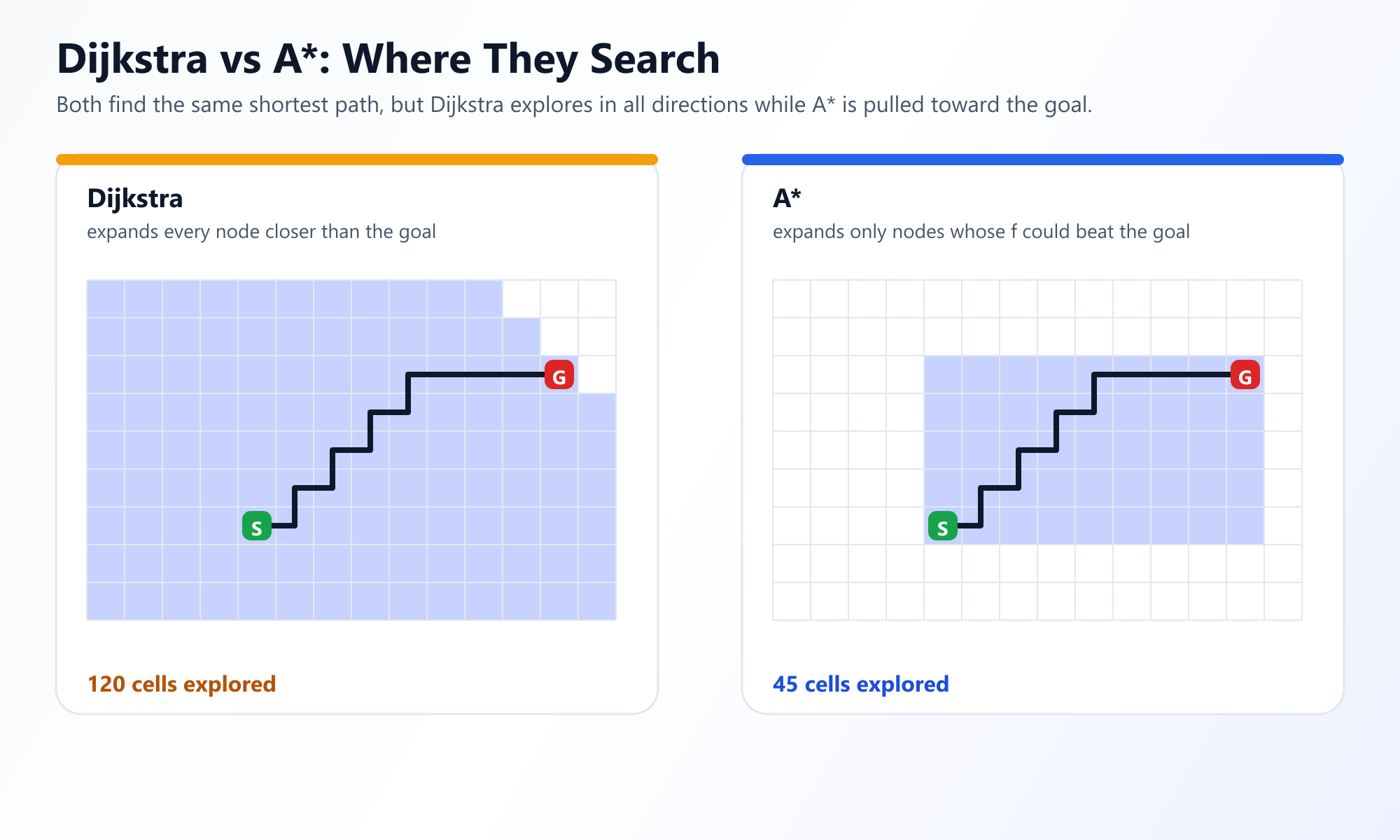
El algoritmo de Dijkstra garantiza encontrar el camino más corto. Sin embargo, es fundamentalmente "ciego". Cuando le pides a Dijkstra que encuentre un camino de Nueva York a Los Ángeles, explorará carreteras que conducen a Boston, Miami y Chicago con el mismo entusiasmo con el que explora carreteras en dirección oeste. Busca hacia afuera en un círculo perfecto (o esfera) en todas las direcciones por igual hasta que accidentalmente choca con el objetivo.
En un mapa grande, explorar todas las direcciones posibles es increíblemente lento y desperdicia enormes cantidades de potencia de procesamiento. Necesitamos un algoritmo que sea lo suficientemente "inteligente" como para saber en qué dirección está el objetivo, para que pueda priorizar la exploración de caminos que se dirigen hacia el objetivo.
3. La Salsa Secreta: Heurísticas (f = g + h)
A* resuelve el problema de la "ceguera" introduciendo una Heurística. Una heurística es una suposición educada. En la búsqueda de rutas, es una función que estima qué tan lejos está un nodo del destino final.
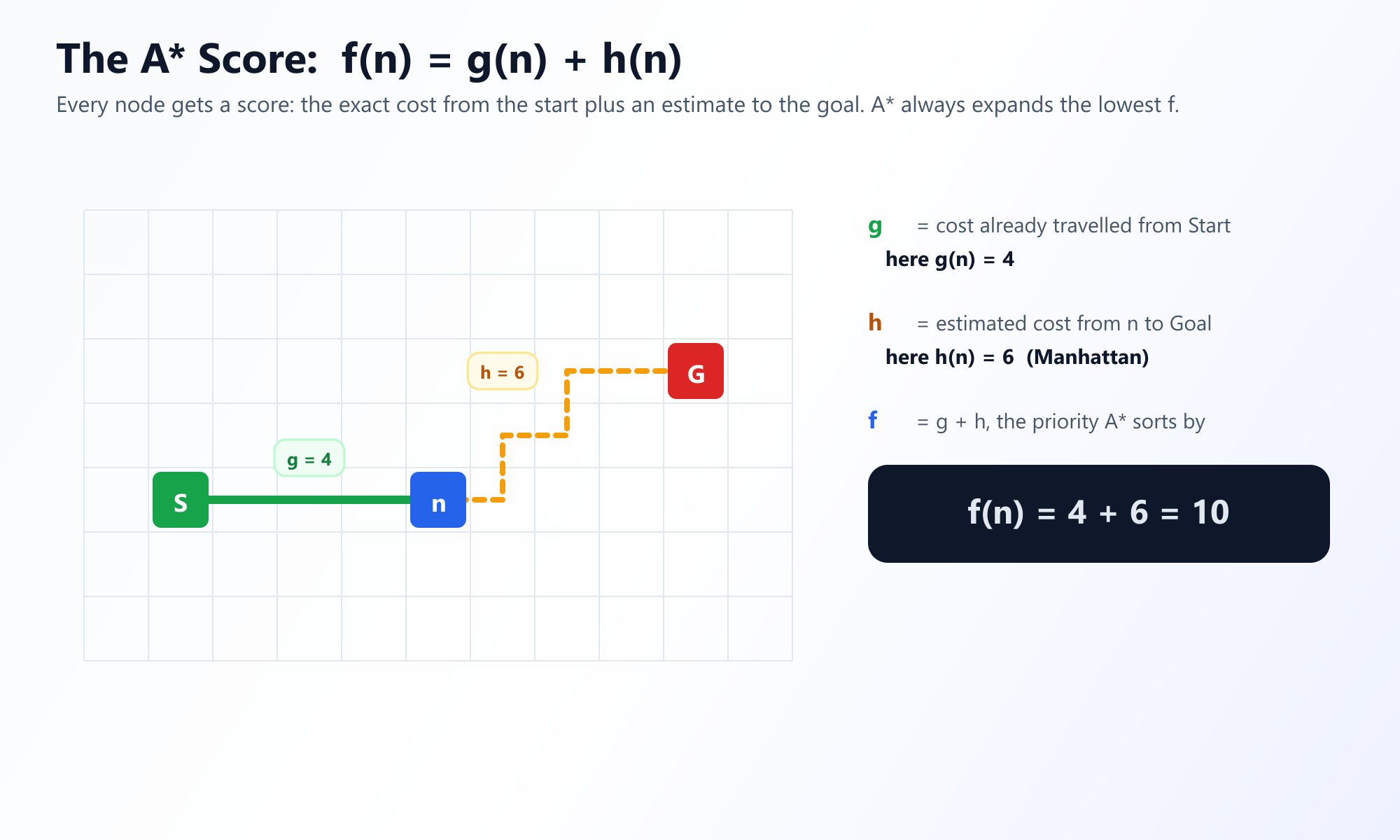
A* asigna una puntuación a cada nodo que descubre. El nodo con la puntuación más baja es el que explora a continuación. La ecuación central de A* es:
nes el nodo actual que se evalúa en el grafo.g(n)es el Costo Exacto. Es la distancia conocida desde el nodo inicial hasta el nodon. (Esto es exactamente lo que usa Dijkstra).h(n)es la Estimación Heurística. Es la distancia estimada desde el nodonhasta el objetivo final.f(n)es el Costo Total. Esta es la suma degyh. A* siempre prioriza el nodo con la puntuaciónfmás baja.
Al agregar el componente h(n), A* es atraído hacia el objetivo como un imán. Ignorará los caminos que van en la dirección opuesta al objetivo, reduciendo drásticamente el espacio de búsqueda en comparación con el algoritmo de Dijkstra.
4. Eligiendo la Heurística Correcta
La magia de A* depende completamente de la precisión de la función heurística h(n). Si tu heurística sobreestima la distancia al objetivo, A* ya no garantiza encontrar el camino más corto. Si la subestima, se vuelve más lento. Por lo tanto, elegir la heurística correcta para tu juego o mapa específico es crítico.
Distancia de Manhattan (Para Cuadrículas sin Diagonales)
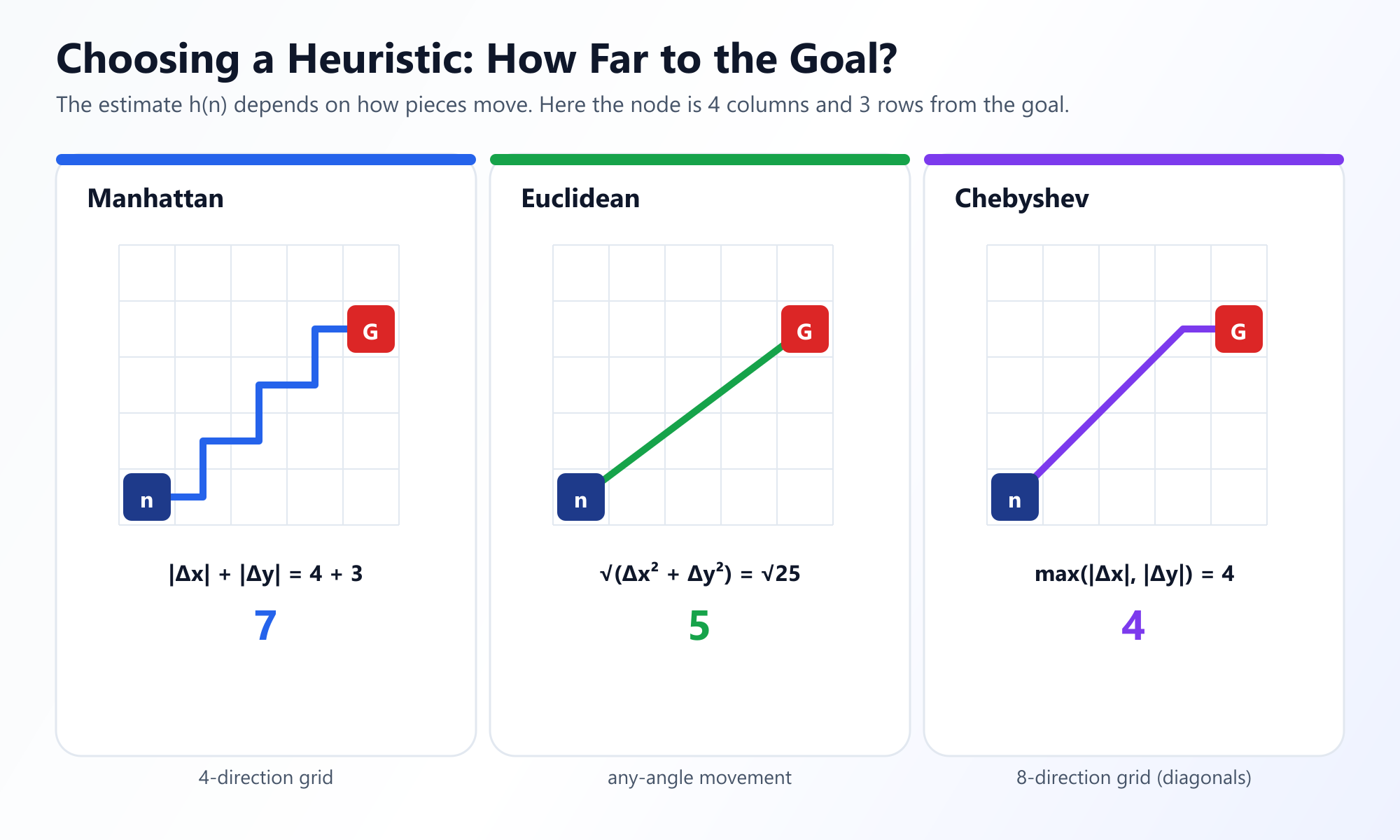
Si tu juego usa una cuadrícula (como Pac-Man o un roguelike tradicional) y los personajes solo pueden moverse Arriba, Abajo, Izquierda o Derecha, debes usar la Distancia de Manhattan. Calcula el número total de bloques horizontal y verticalmente entre el nodo actual y el objetivo.
function heuristic(node, goal) {
return abs(node.x - goal.x) + abs(node.y - goal.y)
}Distancia Euclidiana (Para Mundos Abiertos o Movimiento en Cualquier Ángulo)
Si los personajes pueden moverse en cualquier dirección (o si estás enrutando en un mapa continuo), debes usar la Distancia Euclidiana. Esta es la distancia en línea recta entre dos puntos, calculada usando el teorema de Pitágoras.
function heuristic(node, goal) {
return sqrt((node.x - goal.x)^2 + (node.y - goal.y)^2)
}Distancia de Chebyshev (Para Cuadrículas con Diagonales)
Si tu juego usa una cuadrícula pero permite el movimiento diagonal (donde moverse en diagonal cuesta lo mismo que moverse en línea recta), usas la distancia de Chebyshev. Toma el máximo de las diferencias horizontales o verticales.
function heuristic(node, goal) {
return max(abs(node.x - goal.x), abs(node.y - goal.y))
}
Visualiza la Diferencia
Mira a Dijkstra y A* competir para resolver el mismo laberinto. Nota cómo Dijkstra inunda todo el mapa, mientras que A* crea un camino enfocado como un láser directamente hacia la salida.
Inicia el Visualizador de A*5. Ejecución Paso a Paso de A*
Así es exactamente como el algoritmo mantiene su estado y procesa los nodos durante la ejecución:
- Inicialización: Crea dos conjuntos: un conjunto
OPEN(nodos a evaluar) y un conjuntoCLOSED(nodos ya evaluados). Agrega el nodo inicial al conjuntoOPEN. - Inicio del Bucle: Encuentra el nodo en el conjunto
OPENcon el costofmás bajo. Llamemos a este el nodoCurrent(Actual). - Comprobar Objetivo: Si el nodo
Currentes el objetivo, ¡has terminado! Sigue los punteros padres hacia atrás para reconstruir el camino. - Mover a Closed: Elimina el nodo
Currentdel conjuntoOPENy agrégalo al conjuntoCLOSED. - Expandir Vecinos: Mira todos los vecinos adyacentes del nodo
Current. Por cada vecino:- Si el vecino es un obstáculo (pared) o está en el conjunto
CLOSED, ignóralo. - Calcula el costo
gdel vecino (gActual + distancia al vecino). - Si el vecino no está en el conjunto
OPEN, calcula sus costoshyf, establece su padre aCurrent, y agrégalo al conjuntoOPEN. - Si el vecino ya está en el conjunto
OPEN, comprueba si este nuevo camino hacia el vecino es mejor (tiene un costogmás bajo). Si es así, actualiza su padre y el costog.
- Si el vecino es un obstáculo (pared) o está en el conjunto
- Repetir: Vuelve al Paso 2. Si el conjunto
OPENse vacía y no se ha alcanzado el objetivo, no hay un camino válido.
6. Aplicaciones Reales en Desarrollo de Juegos e IA
A* es la columna vertebral del movimiento en los espacios digitales.
- Juegos de Estrategia en Tiempo Real (RTS): Cuando seleccionas 50 unidades en StarCraft o Age of Empires y haces clic en un punto del mapa, A* calcula 50 caminos individuales, enrutándolos alrededor de edificios, ríos y entre sí. (A menudo utilizando variantes especializadas como Campos de Flujo o A* Jerárquico).
- RPG y Juegos de Sigilo: Los NPCs usan A* en una "NavMesh" (Malla de Navegación - un grafo simplificado de superficies transitables) para perseguir al jugador, patrullar pasillos o buscar cobertura.
- Robótica: Los robots de almacén automatizados (como los que usa Amazon) usan A* para navegar por los pisos de las fábricas sin chocar con estanterías u otros robots.
- Navegación GPS: Aunque el A* estándar es demasiado lento para mapas continentales, se utilizan versiones modificadas (como ALT - A* con Puntos de Referencia y Desigualdad Triangular) para calcular rápidamente las rutas de conducción óptimas.
Preguntas frecuentes
¿Cómo se diferencia el algoritmo A* del de Dijkstra?
A* utiliza una función heurística (que estima la distancia al objetivo) para guiar la búsqueda, mientras que Dijkstra es ciego y explora en todas direcciones por igual. Esto hace que A* sea más rápido y enfocado.
¿Qué es una heurística admisible en A*?
Una heurística admisible es aquella que nunca sobreestima el costo real para alcanzar el objetivo. La admisibilidad garantiza que A* encontrará el camino más corto.
¿Cuándo debo elegir la distancia de Manhattan frente a la euclidiana?
Usa la distancia de Manhattan para cuadrículas donde el movimiento se limita a 4 direcciones (arriba, abajo, izquierda, derecha). Usa la distancia euclidiana para entornos continuos que permiten el movimiento en cualquier ángulo.