
Inhaltsverzeichnis
- 1. Was ist der A* Algorithmus?
- 2. Das Problem mit dem Dijkstra-Algorithmus
- 3. Das Geheimrezept: Heuristiken (f = g + h)
- 4. Die richtige Heuristik wählen (Manhattan vs. Euklidisch)
- 5. Schritt-für-Schritt Ausführung von A*
- 6. Reale Anwendungen in Spieleentwicklung & KI
- 7. Häufig gestellte Fragen (FAQ)
1. Was ist der A* Algorithmus?
Der A* (ausgesprochen "A-Stern" oder "A-Star") Algorithmus ist ein Graphdurchsuchungs- und Pfadsuchalgorithmus, der aufgrund seiner Vollständigkeit, Optimalität und optimalen Effizienz in der Informatik weit verbreitet ist. Er wurde 1968 von Peter Hart, Nils Nilsson und Bertram Raphael vom Stanford Research Institute erfunden und ursprünglich entwickelt, um dem Shakey-Roboter bei der Navigation durch Räume zu helfen.
Heute ist A* der absolute Industriestandard für Routing und Pathfinding. Ob eine Figur in einem Strategiespiel über ein Raster läuft oder ein GPS die schnellste Fahrt durch ein Land berechnet, A* (oder eine Variante davon) übernimmt höchstwahrscheinlich die schwere Arbeit.
2. Das Problem mit dem Dijkstra-Algorithmus
Um zu verstehen, warum A* brillant ist, müssen wir zuerst verstehen, was er verbessert. Vor A* war der Goldstandard für das Finden des kürzesten Pfades der Dijkstra-Algorithmus.
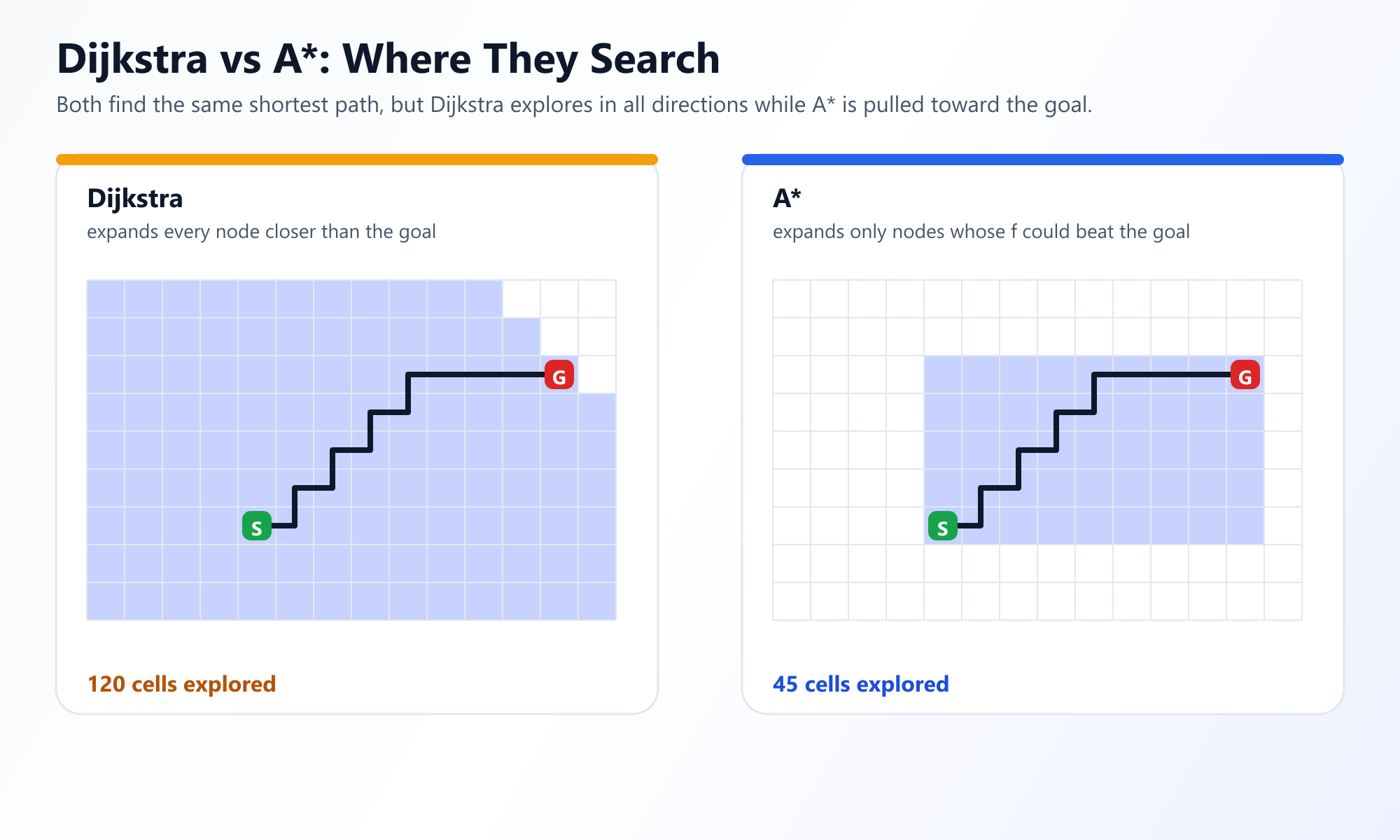
Der Dijkstra-Algorithmus findet garantiert den kürzesten Pfad. Er ist jedoch grundlegend "blind". Wenn Sie Dijkstra bitten, einen Weg von New York nach Los Angeles zu finden, wird er Straßen, die nach Boston, Miami und Chicago führen, genauso eifrig erkunden wie Straßen, die nach Westen führen. Er sucht nach außen in einem perfekten Kreis (oder einer Kugel) in alle Richtungen gleichmäßig, bis er zufällig auf das Ziel stößt.
Auf einer großen Karte ist die Erkundung jeder möglichen Richtung unglaublich langsam und verschwendet massive Mengen an Rechenleistung. Wir brauchen einen Algorithmus, der "clever" genug ist, um zu wissen, in welcher Richtung sich das Ziel befindet, damit er priorisieren kann, Wege zu erkunden, die in Richtung des Ziels führen.
3. Das Geheimrezept: Heuristiken (f = g + h)
A* löst das "Blindheits"-Problem durch die Einführung einer Heuristik. Eine Heuristik ist eine fundierte Schätzung. Beim Pathfinding ist es eine Funktion, die schätzt, wie weit ein Knoten vom endgültigen Ziel entfernt ist.
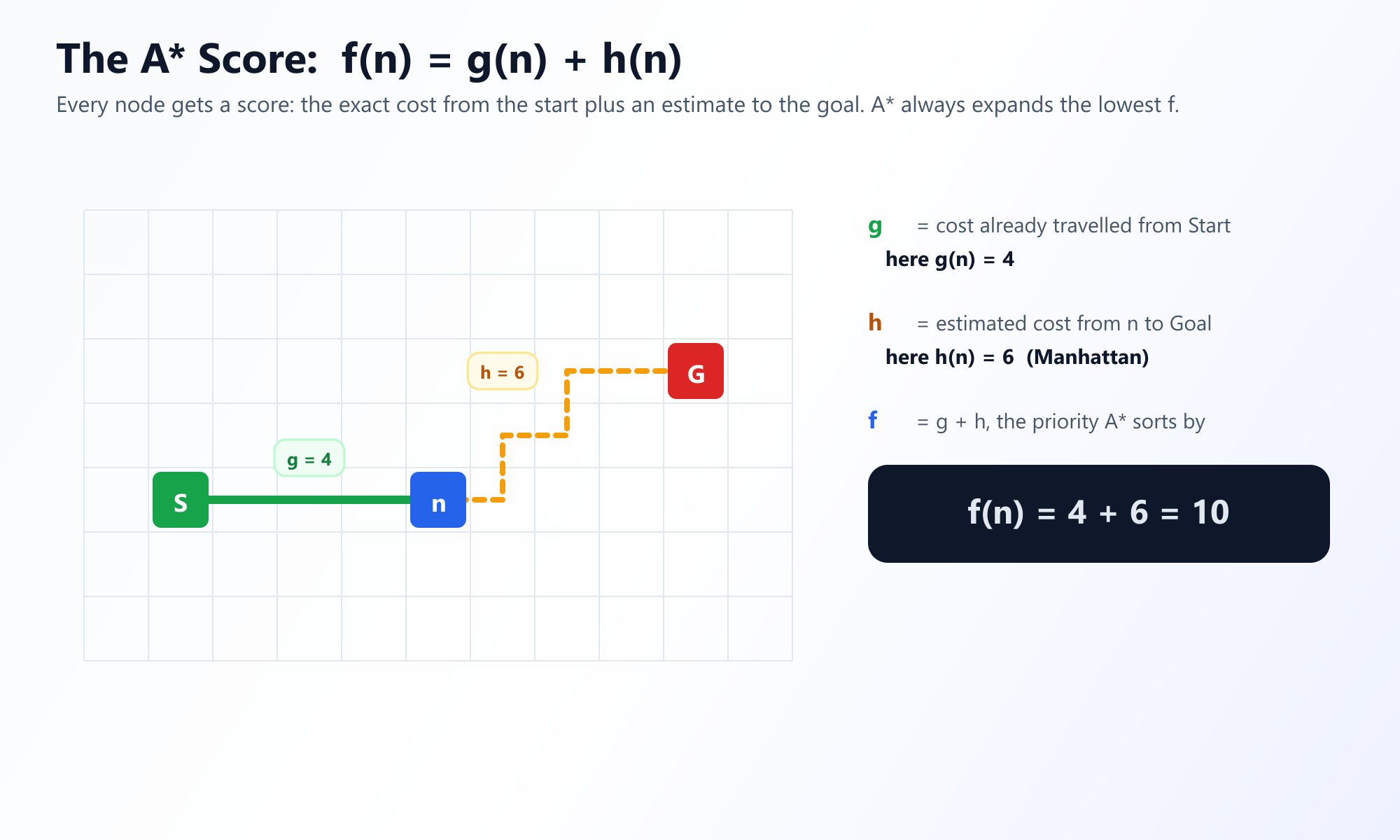
A* weist jedem entdeckten Knoten eine Punktzahl zu. Der Knoten mit der niedrigsten Punktzahl ist derjenige, den er als Nächstes erkundet. Die Kerngleichung von A* lautet:
nist der aktuell ausgewertete Knoten im Graphen.g(n)sind die Exakten Kosten. Es ist die bekannte Entfernung vom Startknoten zum Knotenn. (Dies ist genau das, was Dijkstra verwendet).h(n)ist die Heuristische Schätzung. Es ist die geschätzte Entfernung vom Knotennzum endgültigen Ziel.f(n)sind die Gesamtkosten. Dies ist die Summe vongundh. A* priorisiert immer den Knoten mit dem niedrigstenf-Wert.
Durch Hinzufügen der h(n)-Komponente wird A* wie von einem Magneten zum Ziel gezogen. Er ignoriert Pfade, die in die entgegengesetzte Richtung des Ziels führen, was den Suchraum im Vergleich zum Dijkstra-Algorithmus drastisch reduziert.
4. Die richtige Heuristik wählen
Die Magie von A* hängt vollständig von der Genauigkeit der Heuristikfunktion h(n) ab. Wenn Ihre Heuristik die Entfernung zum Ziel überschätzt, garantiert A* nicht mehr, dass er den kürzesten Pfad findet. Wenn sie unterschätzt, wird er langsamer. Daher ist die Auswahl der richtigen Heuristik für Ihr spezifisches Spiel oder Ihre Karte von entscheidender Bedeutung.
Manhattan-Distanz (Für Rasterwelten ohne Diagonalen)
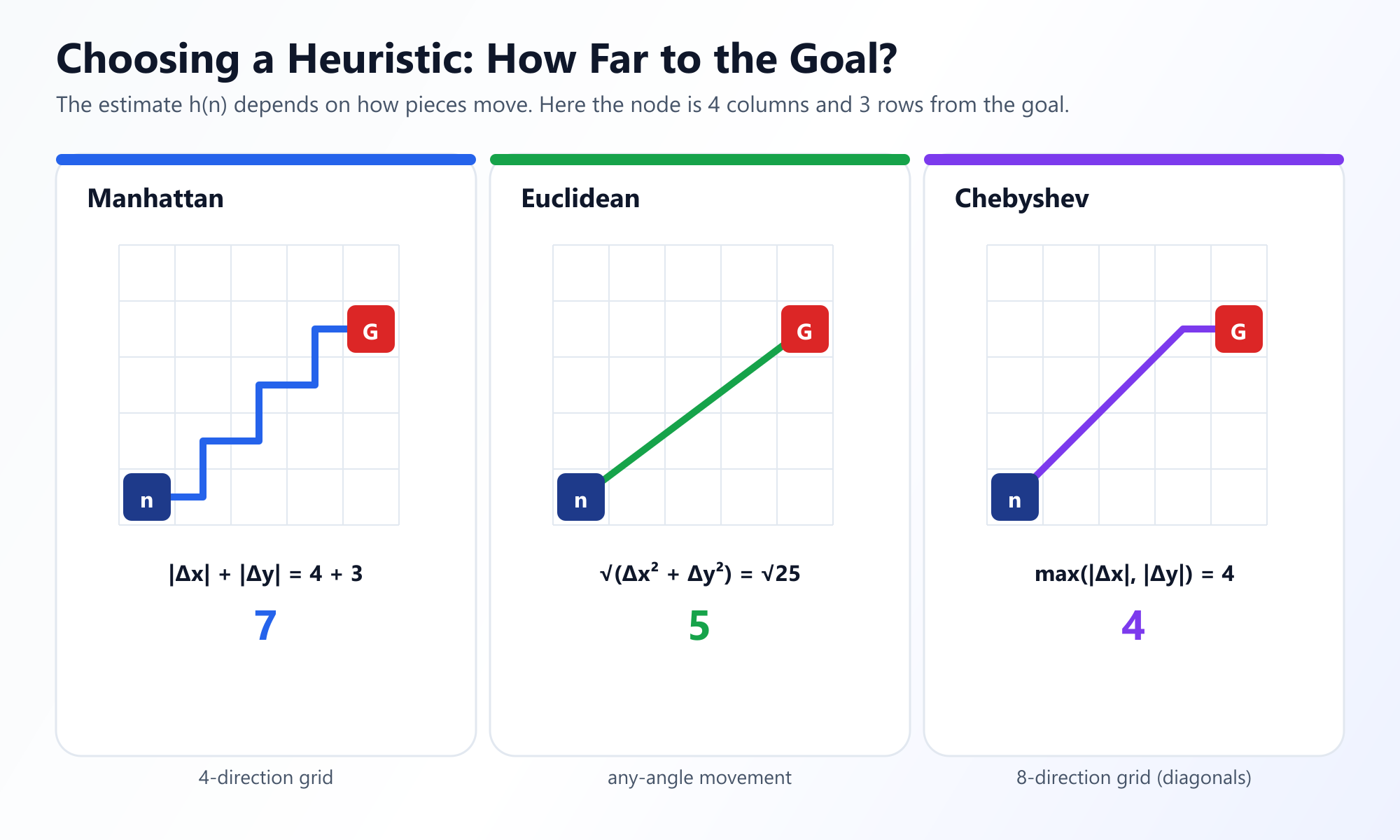
Wenn Ihr Spiel ein Raster verwendet (wie Pac-Man oder ein traditionelles Roguelike) und sich Charaktere nur nach oben, unten, links oder rechts bewegen können, sollten Sie die Manhattan-Distanz verwenden. Sie berechnet die Gesamtzahl der Blöcke horizontal und vertikal zwischen dem aktuellen Knoten und dem Ziel.
function heuristic(node, goal) {
return abs(node.x - goal.x) + abs(node.y - goal.y)
}Euklidische Distanz (Für offene Welten oder Bewegung in jedem Winkel)
Wenn sich Charaktere in jede Richtung bewegen können (oder wenn Sie auf einer kontinuierlichen Karte routen), sollten Sie die Euklidische Distanz verwenden. Dies ist die geradlinige "Luftlinien"-Entfernung zwischen zwei Punkten, berechnet mit dem Satz des Pythagoras.
function heuristic(node, goal) {
return sqrt((node.x - goal.x)^2 + (node.y - goal.y)^2)
}Tschebyschow-Distanz (Für Rasterwelten mit Diagonalen)
Wenn Ihr Spiel ein Raster verwendet, aber diagonale Bewegungen zulässt (wobei diagonales Bewegen genauso viel kostet wie gerades Bewegen), verwenden Sie die Tschebyschow-Distanz. Sie nimmt das Maximum der horizontalen oder vertikalen Differenzen.
function heuristic(node, goal) {
return max(abs(node.x - goal.x), abs(node.y - goal.y))
}
Visualisieren Sie den Unterschied
Beobachten Sie, wie Dijkstra und A* darum rennen, dasselbe Labyrinth zu lösen. Beachten Sie, wie Dijkstra die gesamte Karte überflutet, während A* einen laserfokussierten Pfad direkt zum Ausgang erstellt.
A* Visualisierer starten5. Schritt-für-Schritt Ausführung von A*
Hier ist genau, wie der Algorithmus seinen Status aufrechterhält und Knoten während der Ausführung verarbeitet:
- Initialisierung: Erstellen Sie zwei Mengen: eine
OPEN-Menge (zu evaluierende Knoten) und eineCLOSED-Menge (bereits evaluierte Knoten). Fügen Sie den Startknoten derOPEN-Menge hinzu. - Schleifenstart: Finden Sie den Knoten in der
OPEN-Menge mit den niedrigstenf-Kosten. Nennen wir diesen denCurrent(aktuellen) Knoten. - Zielprüfung: Wenn der
CurrentKnoten das Ziel ist, sind Sie fertig! Folgen Sie den Eltern-Zeigern rückwärts, um den Pfad zu rekonstruieren. - Nach Closed verschieben: Entfernen Sie den
CurrentKnoten aus derOPEN-Menge und fügen Sie ihn derCLOSED-Menge hinzu. - Nachbarn erweitern: Betrachten Sie alle benachbarten Knoten des
CurrentKnotens. Für jeden Nachbarn:- Wenn der Nachbar ein Hindernis (Wand) ist oder sich in der
CLOSED-Menge befindet, ignorieren Sie ihn. - Berechnen Sie die
g-Kosten des Nachbarn (Aktuellesg+ Entfernung zum Nachbarn). - Wenn sich der Nachbar nicht in der
OPEN-Menge befindet, berechnen Sie seineh- undf-Kosten, setzen Sie seinen Elternteil aufCurrentund fügen Sie ihn derOPEN-Menge hinzu. - Wenn sich der Nachbar bereits in der
OPEN-Menge befindet, prüfen Sie, ob dieser neue Pfad zum Nachbarn besser ist (niedrigereg-Kosten hat). Wenn ja, aktualisieren Sie sein Elternteil und dieg-Kosten.
- Wenn der Nachbar ein Hindernis (Wand) ist oder sich in der
- Wiederholen: Gehen Sie zurück zu Schritt 2. Wenn die
OPEN-Menge leer wird und das Ziel nicht erreicht wurde, gibt es keinen gültigen Pfad.
6. Reale Anwendungen in Spieleentwicklung & KI
A* ist das Rückgrat der Bewegung in digitalen Räumen.
- Echtzeit-Strategiespiele (RTS): Wenn Sie 50 Einheiten in StarCraft oder Age of Empires per Drag-Select auswählen und auf einen Punkt auf der Karte klicken, berechnet A* 50 individuelle Pfade und leitet sie um Gebäude, Flüsse und einander herum. (Häufig unter Verwendung spezieller Varianten wie Flow Fields oder Hierarchischem A*).
- RPG und Stealth-Spiele: NPCs verwenden A* auf einem "NavMesh" (Navigationsnetz - ein vereinfachter Graph begehbarer Flächen), um den Spieler zu jagen, Korridore zu patrouillieren oder Deckung zu finden.
- Robotik: Automatisierte Lagerroboter (wie die von Amazon) verwenden A*, um auf Fabrikböden zu navigieren, ohne mit Regalen oder anderen Robotern zu kollidieren.
- GPS Navigation: Während Standard-A* für kontinentale Karten zu langsam ist, werden modifizierte Versionen (wie ALT - A* mit Landmarks und Dreiecksungleichung) verwendet, um optimale Fahrtrouten schnell zu berechnen.
Häufig gestellte Fragen
Wie unterscheidet sich der A*-Algorithmus von Dijkstra?
A* verwendet eine heuristische Funktion (die die Entfernung zum Ziel schätzt), um die Pfadsuche zu steuern, während der Dijkstra-Algorithmus blind in alle Richtungen sucht. Dies macht A* wesentlich schneller und zielgerichteter.
Was ist eine zulässige Heuristik bei A*?
Eine zulässige Heuristik ist eine Heuristik, die die tatsächlichen Kosten zum Ziel niemals überschätzt. Die Zulässigkeit garantiert, dass A* den mathematisch kürzesten Pfad findet.
Wann sollte ich die Manhattan- vs. die Euklidische Distanz wählen?
Verwenden Sie die Manhattan-Distanz für Raster, bei denen die Bewegung auf 4 Richtungen beschränkt ist (hoch, runter, links, rechts). Verwenden Sie die Euklidische Distanz für kontinuierliche Umgebungen, die Bewegungen in jedem Winkel zulassen.